三相正弦波脈寬調制(SPWM)信號發生器SM2001

摘要:介紹一種可自動產生三相正弦波脈寬調制波形的專用芯片的結構、原理及使用方法。它可廣泛用于三相電機的變頻控制,三相UPS的驅動等領域。關鍵詞:正弦波脈寬調制;接口;變頻;控制
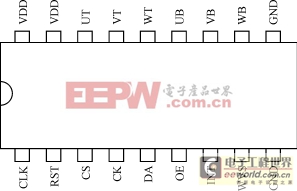
圖1SM2001外形與管腳
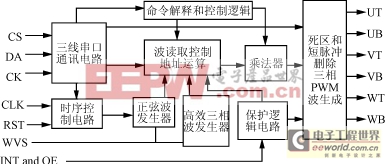
圖2SM2001內部邏輯框圖
1引言
SM2001是可產生三相SPWM驅動波形的大規模集成電路。它的工作頻率寬,合成正弦諧波小,調節方便、準確,保護電路完善,無需外部元器件,且有普通正弦波和高效電機驅動波兩種波形的選擇,可廣泛用于交流異步電機的變頻驅動,如變頻空調、變頻冰箱和變頻洗衣機的控制驅動,各類工業水泵、風機的變頻驅動,各類不間斷電源(UPS)以及其它一些需要三相SPWM波形驅動的功率控制電路中。
2SM2001結構與邏輯框圖
SM2001采用0.6μmCMOS工藝制造。電路內部集成有三線串行接口、雙波形正弦發生器、幅度因子乘法器、PWM波形發生器、死區時間和窄脈沖控制電路、啟動電路和保護電路等。封裝采用DIP18塑封。
SM2001的外形圖如圖1所示。其管腳說明如表1所列。其內部邏輯框圖如圖2所示。
3SM2001的設計特點 SM2001設計特點如下:
1)全數字化設計,全數字化電路。
2)內部帶兩套波形發生器,可產生標準正弦波和用于交流電機控制的高效準正弦波。
3)自動產生三相PWM調制波形,范圍從0到200Hz(時鐘為20MHz時),步進頻率為最大頻率的1/255。
三相正弦波脈寬調制(SPWM)信號發生器SM2001
表1管腳說明管腳名稱類型功能說明
1CLKI外部時鐘輸入腳
2RSTI復位腳,為低時復位芯片
3CSI串口片選腳,低通訊有效
4CKI串口時鐘腳,上升沿鎖入數據
5DAI串口數據腳
6OEI輸出控制腳,為高允許PWM輸出
7INTI異常中斷腳,下降沿觸發
8WVSI內部波形選擇,高效/普通
9GNDI數字地
10GNDI輸出地
11WBIW相下橋臂驅動腳
12VBOV相下橋臂驅動腳
13UBOU相下橋臂驅動腳
14WTOW相上橋臂驅動腳
15VTOV相上橋臂驅動腳
16UTOU相上橋臂驅動腳
17VDDI正電源(+5V)
18VDDI正電源(+5V)
4)采用雙邊沿規則采樣產生PWM調制波形。
5)載波頻率可多級選擇,最高可達到38kHz。
6)可選擇死區時間和窄脈沖時間,范圍從0.05μs~25.6μs。
7)采用高速三線同步串行接口,通訊速度可達到1MHz。
8)通過MCU進行參數化控制,需要占用MCU的資源極小。
9)驅動電流達20mA,可直接驅動光耦。
10)采用外部時鐘驅動,可與單片機共用一個晶體諧振器,最高工作頻率可達24MHz。
11)有完善的多級保護電路,保護動作靈敏(典型反應時間小于2個時鐘周期)。
12)PWM波形調整快,在一個PWM周期內即可完成變換。
13)三相輸出的電平為負脈沖有效,無波形輸出時保持高電平。
SM2001有6個PWM輸出端口,通過雙邊沿規則采樣的方法產生6路PWM輸出波形,分別驅動U、V、W三相橋式功率開關,每相的信號由2路與TTL電平兼容的管腳輸出。該信號通常是通過外部的隔離器件(如光耦)來驅動橋式電路。2個信號分別驅動某一相的上半橋臂和下半橋臂。
在通過PWM合成正弦波的方法中,有多種參數需要確定,如:三相正弦波的頻率、三相正弦波的幅度、PWM波的頻率、最小窄脈沖寬度和死區時間。在SM2001的控制設置中,這些參數全部可以通過一個高速串行口進行實時調節。
對于電力應用或功率電路的驅動,除正常的功能外,最重要的就是完善的保護機制了。而SM2001具有完善的保護電路。在SM2001中,設置了三個層次的安全保護。
一個是SPWM輸出的開啟命令:在SM2001的設置中,有一條開啟指令,在所有的初始化參數設置完成后,芯片并不是立即產生輸出波形,只有在開啟命令發布后,SPWM波形才會輸出,這是為了防止在系統未完成初始化時有錯誤的波形產生。而一旦開啟SPWM的輸出后,再進行參數設置時,SPWM的變化將立即出現,不再需要開啟命令了。
第二個保護是OE控制端,它是用于單片機的普通輸出控制的。在SM2001上有一個使能控制端OE,接受控制系統的控制信號。當OE為高電平時,SPWM完整輸出波形,否則,輸出將保持高電平靜止狀態。
第三重保護是異常中斷控制端INT,主要是接受系統的異常信號,如輸出短路、斷相等異常信號。當外部檢測電路發現異常,在INT上產生一個負電平或負脈沖信號,SM2001的輸出將立即截止,且反應時間小于200ns,大大高于普通采用單片機系統產生SPWM波形的控制模式。在異常保護出現后,芯片將不能通過命令恢復輸出(防止由于單片機的故障而產生錯誤的開啟),只有在重新上電或RST復位后,芯片才能重新接受控制。
由于SM2001采用了內部的大規模正弦波形發生器,所以輸出的正弦波精度高,失真和諧波都很小,且由于采用參數設置的方式,各種微處理器都可以很方便地控制SM2001。由于是全數字化的設計,內部的波形發生器、乘法器、PWM波形產生電路的精度都高于最后實際的輸出精度,所以產生的SPWM波形具有非常高的準確度和穩定性。而精確的波形可以使功率輸出電路的效率得到提高。
SM2001完全可以作為微處理器的一個獨立的外部電路工作。在設置初始化條件后,SM2001完全自動產生SPWM驅動波形。只有當需要改變輸出波形或處理異常中斷等狀態時,才需要微處理器的干預。
在SM2001芯片內部有兩套標準的三相SPWM驅動波形,即純正弦波和高效準正弦波。可通過端口WVS的設置電平來選擇。其中純正弦波主要用于UPS等系統,而高效準正弦波主要用于交流電機驅動方面,這種波形可提高電機驅動系統的效率。這兩種
波形可以滿足絕大部分的應用需求。對于特殊的波形需求則可以通過修改波形發生器來得到。
4內部控制寄存器說明
SM2001的工作狀態和輸出信號的參數是由內部的寄存器控制。寄存器大小為8Bit,地址用3Bit的二進制碼表示。故通訊數據為11Bit。
4?1頻率控制寄存器PFR(地址011)
控制三相SPWM波的頻率,256級選擇精度,地址為011。它控制輸出的PWM合成的正弦波的頻率,三相波形的頻率是相同的,通過此寄存器進行選擇。B7B6B5B4B3B2B1B0
Pf7Pf6Pf5Pf4Pf3Pf2Pf1Pf0
輸出的三相波頻率fsin由式(1)算出
fsin=fclk×PFR/(512×192×256)(1)
式中:fclk——是系統時鐘的頻率;
PFR——PFR寄存器的值(0~255)。
例如:如果時鐘頻率為20MHz,PFR=63,則三相正弦波的頻率為50.1Hz。
4?2調制度控制寄存器AMPR(地址010)
改變輸出三相波的幅度,256級選擇精度,地址為010。它控制輸出的PWM合成的正弦波的幅度,三相波形的幅度是相同的,通過此寄存器進行選擇。B7B6B5B4B3B2B1B0
Amp7Amp6Amp5Amp4Amp3Amp2Amp1Amp0
輸出的三相波幅度Asin由式(2)算出
Asin=(AMPR/255)×100%(2)
式中:AMPR——AMPR寄存器的值(1~255)。
例如:如果后級功率電路的直流電壓為300V,AMPR=128,選取純正弦波輸出,則輸出正弦波的峰值電壓為150V,有效值電壓為106V。但根據死區時間和窄脈沖時間的大小不同而產生的效應,實際的輸出電壓可能略小于此數值。
4?3PWM開關頻率和窄脈沖寄存器FPDR
(地址001)
設置PWM載波的開關頻率和要刪除的無效窄脈沖寬度,地址為001。PWM的開關頻率是后級大功率管或大功率模塊的重要參數之一,它往往取決于后級功率電路的開關時間、工作效率、是否要靜音設計等要求。本芯片的PWM的開關頻率與時鐘頻率有關,在20MHz時鐘時最高開關頻率可達到38kHz,完全滿足高速儀表中的靜音設計要求。B7B6B5B4B3B2B1B0
CF1CF0PD5PD4PD3PD2PD1PD0
4.3.1PWM頻率選擇位CF1、CF0
當CF1、CF0為11、10、01、00時,其對應的分頻系數N則分別為8、4、2、1。
PWM開關頻率fc由式(3)算出
fc=fclk/(512×N)(3)
例如:若時鐘頻率為20MHz,PWM頻率選擇字為11,則
fc=20000000/(512×8)=4882Hz
4.3.2窄脈沖時間選擇位PD5~PD0
窄脈沖的時間tpd由式(4)算出
tpd=PD/(fc×512)(4)
式中:PD——窄脈沖時間選擇數值。
窄脈沖刪除功能是指在PWM波中,由于后級電路的開關時間問題,小于tpd寬度的脈沖不能引起后級電路的動作,可以被刪除去。參見圖3。
4?4死區時間選擇寄存器DTIM(地址100)
設置PWM載波的死區時間寬度,地址為100。B7B6B5B4B3B2B1B0
--DT5DT4DT3DT2DT1DT0
PWM載波的死區時間也是后級大功率管或大功率模塊的重要參數之一,它取決于后級功率電路的導通時間和截止時間。對于采用IGBT作為功率輸出的電路,則尤為重要。如果設置不當,會導致功率電路燒毀或諧波失真增加,死區時間設置參見圖4。
死區時間tpdy由式(5)算出:
tpdy=DT/(fc×512)(5)
式中:DT——死區時間選擇數值。
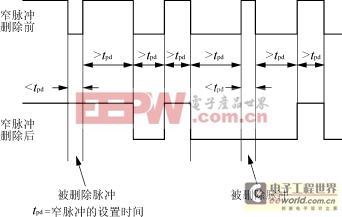
圖3窄脈沖刪除示意圖
三相正弦波脈寬調制(SPWM)信號發生器SM2001
表2復位狀態時各寄存器內容寄存器復位值111111111100110000111110XX111111
寄存器窄脈沖選擇和PWM頻率寄存器幅度控制寄存器AMPR頻率控制寄存器PFR死區時間控制寄存器DTIM
fclk=20MHzVDD=300VfPWM=4882Hztpd=25.6μs80%50Hztpdy=25.6μs
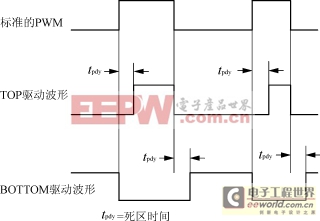
圖4死區時間設置

圖5數據的輸入時序
4?5開啟命令START(地址110)
在完成芯片的各項參數的初始化設置后,通過往地址110中寫入5FH,即可以開啟芯片的SPWM輸出。以后的參數改變,一旦寫入寄存器即立即表現出來,不必再使用開啟命令了。
5三線同步串行接口
SM2001的寄存器是通過一個三線同步串行接口進行設置的。A0A1A2D0D1D2D3D4D5D6D7
寄存器選擇寄存器數據
當片選CS為低時,芯片進入串行通信狀態,在每個時鐘CK的上升沿,數據線DA上的數據被移入內部緩沖器,當11個數據位全部進入緩沖器后,在最后一個CK脈沖的認可下,數據被轉入相應的寄存器,且命令被立即執行。
地址和數據的低位在先傳入,分別為A0、A1、A2、D0、D1、D2、D3、D4、D5、D6、D7。由于內部的時序原因,在完成所有的數據輸入,CS恢復高電平后,必須在CK上額外地多加入一個時鐘,完成數據的認可,具體如圖5所示。
6上電和復位
RST接低電平時,芯片進入復位狀態。此時輸出端輸出高電平,各寄存器的內容如表2所列。
復位主要是用來恢復INT異常中斷的狀態。如果不是首次上電,復位并不能清除開啟命令。在芯片工作中時復位,芯片將以初始化條件輸出PWM波形,所以應配合使用OE的功能,首先關閉SPWM輸出(OE=0),復位電路(RST上加入一個負脈沖),在設置好需要的參數后,再開啟OE,才能正常的輸出波形。
當采用20MHz的時鐘時,表2中的缺省條件表示PWM的頻率為4882Hz,死區和短脈沖時間為25.6μs,正弦波頻率為50Hz,合成正弦波峰值幅度為電源的80%。(注意:在芯片的OE不為高,或MCU未發送開始命令時,U、V、W端口并沒有實際的SPWM輸出)
當芯片首次上電時,也將自動復位所有的寄存器為內部初始值,且芯片的輸出端保持高電平(不輸出時的缺省狀態)。
7示范電路和與IPM的接口
示范電路與IPM接口電路如圖6所示。
7?1說明
1)采用簡單的MCU的5根IO口即可控制SM2001,并直接將MCU的時鐘作為SM2001的時鐘。
2)IPM的驅動及電源要求見三菱電機的手冊《智能化IGBT模塊——IPM》。
7?2示范程序
CLRRES;芯片復位
ACALLDELAY3;延時
SETBRES
CLROE;關閉輸出CLRTCK
SETBTCS;選擇通訊
MOVA,#03H;設置PFR寄存器
MOVB,#50;初始頻率30Hz
ACALLCOMMOUT
(a)示范電路
(b)與IPM接口電路
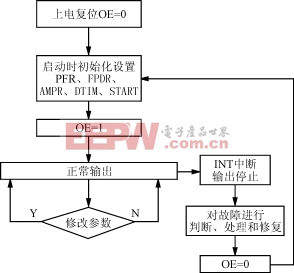
圖6示范電路與IPM接口電路
三相正弦波脈寬調制(SPWM)信號發生器SM2001
MOVA,#02H;設置AMPR寄存器
MOVB,#80H;初始幅度80%
ACALLCOMMOUT
MOVA,#01H;設置FPDR寄存器
MOVB,#11010000b;PWM頻率5KHz
ACALLCOMMOUT;窄脈沖6.25us
MOVA,#04H;設置DTIM寄存器
MOVB,#00010000b;死區時間6.25us
ACALLCOMMOUT
SETBOE
MOVA,#06H;開啟PWM輸出
MOVB,#5FH
ACALLCOMMOUT
......
8SM2001控制流程
控制流程圖如圖7所示。
參考文獻
[1]深圳國微電子股份有限公司.SM2001數據手冊[M].2002.
[2]MITSUBISHI公司.智能化IGBT模塊——IPM[M].1997.

模擬信號相關文章:什么是模擬信號
pwm相關文章:pwm是什么
電子鎮流器相關文章:電子鎮流器工作原理
pwm相關文章:pwm原理
負離子發生器相關文章:負離子發生器原理 脈沖點火器相關文章:脈沖點火器原理 脈寬調制相關文章:脈寬調制原理 三相異步電動機相關文章:三相異步電動機原理








評論