高壓無功功率自動檢測補償系統

在大型電力電子裝置的供電系統中,往往存在著大量的諧波干擾,致使功率因數 難以測量、無功功率不易補償。為此,本文提出了一 種新的高壓無功功率自動檢測補償系統。通過對電流波形進行數字濾波,準確地確定了功率因數。同時,采用非線性控制技術,較好地解決了無功功率的自動補償問題。試驗證明,該系統穩定可靠,節能效果明顯。
【關鍵詞】 無功補償,功率因數檢測,數字濾波,非線性控制
AUTOMATIC MEASUREMENT AND COMPENSATION SYSTEM OF HIGH VOLTAGE REACTIVE POWER
XU Jun REN Yongyi
(National University of Defence Technology,Changsha,410073)
【Abstract】 There are a lot of harmonic disturbances in the power supply system of large-scale power electronics setup.The harmonic disturbances result in difficulties to measure the power factor and to compensate the reactive power.This paper presents a new automatic measurement and compensation system of high voltage reactive power.The power factor can be measured accurately by digital filter of current waveforms and the reactive power can be compensated by non-linear control.Experiments have proved that the system is stable and reliable.
【Keywords】 reactive power compensation,power factor measurment,digital filter,non-linear control
1 引言
在一般的供電系統中,若負載是線性的,則電流電壓波形均為正弦。此時,功率因數的定義是電流電壓間相位差的余弦。因此,一般的功率因數檢測方法是,檢測電流與電壓信號過零的時間差,算出相應的功率因數角和功率因數。但是,隨著工業的發展,電網中的諧波日趨嚴重。特別在一些大型電力電子裝置(如:電弧煉鋼爐等)的供電系統中,負荷的非線性和沖擊性等常會產生大量的高次諧波,使供電電流波形產生明顯畸變。此時,上述確定功率因數的方法將不再合適,并由此導致按常規算法得到的無功功率也不準確,進而使無功自動補償的效果變差。為此,本系統提出并采用了數字濾波的方法,提取畸變電流波形的有效分量,得到相應的功率因數值。同時,針對相位補償調節器的特點,利用非線性控制技術較好地實現了無功功率的自動補償。
2 系統的工作原理
系統的原理框圖如圖1所示。
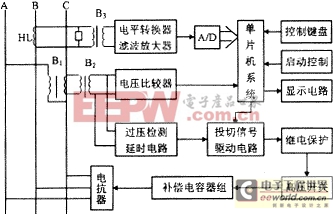
圖1 系統原理框圖 三相高壓電的AC相高壓經電壓互感器B1和降壓變壓器B2加入電壓比較器,得到一頻率為50Hz的矩形波。將該矩形波輸入至單片機,作為對電流信號采樣的啟動信號。B相電流經電流互感器HL和隔離變壓器B3加至濾波放大和電平轉換電路。其中,濾波放大電路一方面將電流信號放大到合適的幅度,另一方面則對電流信號中可能引起頻率混疊的高次諧波進行初步抑制,以利提高后續數字濾波的精度,濾波器的截止頻率應為基波頻率的N/2倍。本系統每周期的采樣點數為64,故濾波放大電路的截止頻率取為1600Hz。這樣既可滿足采樣定理的要求,又使濾波器本身產生的相移相對功率因數角可以忽略,減少系統附加相移造成的影響。 3 濾波與控制算法 為確定合適的濾波與控制算法,首先應對畸變電流的諧波含有率和非正弦電路中無功功率與功率因數的定義及算法進行研究。以在株洲鋼廠110kV/6kV變電站測得的兩臺電弧煉鋼爐不同冶煉期的電流信號為例,采用FFT進行頻譜分析,算出電流信號的平均諧波含有率如表1所示。 表1 電弧爐的平均諧波含有率(%) |
| 諧波次數 | 諧波含有率 | 諧波次數 | 諧波含有率 |
| 1 | 100 | 11 | 1.73 |
| 2 | 11.65 | 12 | 4.83 |
| 3 | 10.85 | 13 | 1.78 |
| 4 | 4.29 | 14 | 2.42 |
| 5 | 13.28 | 15 | 0.24 |
| 6 | 3.94 | 16 | 0.69 |
| 7 | 3.65 | 17 | 0.93 |
| 8 | 1.67 | 18 | 0.31 |
| 9 | 3.51 | 19 | 0.68 |
| 10 | 2.57 | 20 | 0.34 |
有功功率 cos 因此,只要得到電壓、電流的基波分量U1和I1及其夾角的余弦cos
令k=1可得電流信號的基波分量:
其中,實部
虛部
則基波功率因數為:
由此不僅可以得到系統的功率因數cos
實際中,當電流波形畸變且沖擊性較大時,補償電容的容量還不能簡單地按上式計算。因為,幅值和相位經常變化的電流信號會造成補償電容器的頻繁投切,從而影響高壓真空開關的壽命。為此,本系統設計了相應的非線性數字PI調節器,其非線性特性如圖2所示。 |


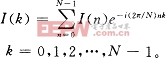
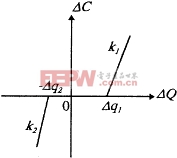
圖2 調節器非線性特性 圖中ΔQ為本次采樣檢測所得的無功功率與前次無功功率之差值,ΔC則是應增加或減少的補償電容容量。
其中,Δq1和k1分別是無功功率為正,即無功是感性時的投切門限和調節器比例系數;Δq2和k2則是無功功率為負,即無功是容性時的投切門限和調節器比例系數。由于電業部門對無功為負控制很嚴,故必須要求:Δq2Δq1,k2>k1。 C(n)=C(n-1)+ΔC(n) 總之,系統在硬件復位后即開始運行數字濾波和非線性控制算法。首先對電流信號做DFT處理,算出系統的功率因數和無功功率。然后,針對無功功率的大小和符號進行非線性PI調節運算。當無功大于投切門限[-Δq2,Δq1]時,分別按感性無功或容性無功的比例系數(k1、k2)做PI調節運算,輸出相應的投切控制量;而當無功小于投切門限時,則保持原輸出投切量不變。在這里Δq1、Δq2、k1和k2的設置不僅可憑經驗由程序給定,而且可根據實際情況通過一個4×4小控制鍵盤改變。這大大增加了系統的適應性,為用戶提供了更多的方便。 4 試驗與結論 本系統研制成功后,分別在實驗室和現場環境對不同相位的工頻信號進行了功率因數的檢測精度試驗。結果表明,系統功率因數檢測的平均誤差小于2%。之后,全系統在株洲鋼廠110kV/6kV變電站投入實際運行,表2給出了系統運行前后變電站功率因數的變化情況。 表2 系統運行前后變電站功率因數變化情況 |

| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 平均 | |
| 補償前 | 0.84 | 0.83 | 0.86 | 0.80 | 0.82 | 0.85 | 0.83 | 0.81 | 0.83 | 0.83 |
| 補償后 | 0.98 | 0.90 | 0.95 | 0.95 | 0.97 | 0.98 | 0.95 | 0.95 | 0.96 | 0.95 |
作者單位:國防科技大學,長沙 410073 參考文獻 1 宋文南等.電力系統諧波分析.北京:水利電力出版社,1995 |










評論