六點(diǎn)定位原理

一個(gè)自由的物體,它對(duì)三個(gè)相互垂直的坐標(biāo)系來說,有六個(gè)活動(dòng)可能性,其中三種是移動(dòng),三種是轉(zhuǎn)動(dòng)。習(xí)慣上把這種活動(dòng)的可能性稱為自由度,因此空間任一自由物體共有六個(gè)自由度。
如下圖所示:
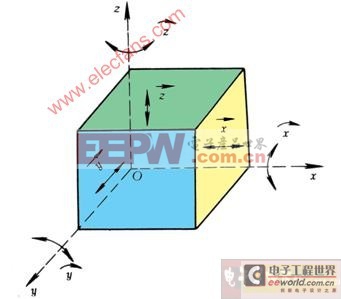
工件在空中的自由度
未受約束的剛體,在空間的位置是不確定的,它具有六個(gè)自由度: 。為使剛體在空間具有確定的
。為使剛體在空間具有確定的
位置,就必須限制其六個(gè)自由度。
定位就是用各種形狀不同的定位元件,來限制工件的自由度。
六點(diǎn)定位原理:用六個(gè)支承點(diǎn)分別限制工件的六個(gè)自由度從而使工件在夾具中得到正確加工位置的方法稱為六點(diǎn)定位原理.
強(qiáng)調(diào):是用六個(gè)支承點(diǎn),而不是用六個(gè)定位元件












評(píng)論