Smith預估補償控制原理

Smith預估補償控制原理
Smith預估補償控制是克服純滯后的一個有效的控制方法。其基本原理是與控制器Gc(s)并聯接一個補償環節,用來補償被控對象中的純滯后部分。這個補償環節稱為預估器,其傳遞函數為:

償回路稱為純滯后補償器。補償后的控制系統結構
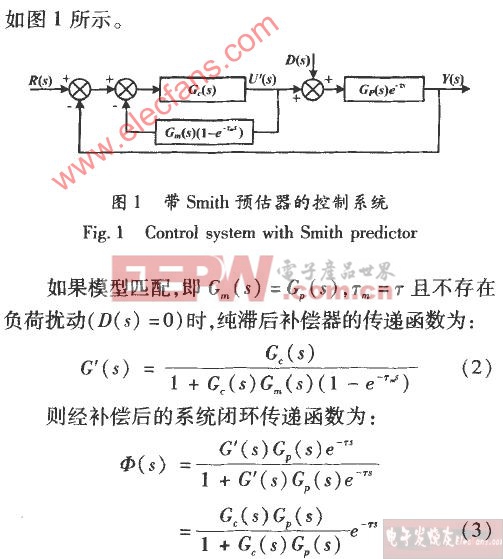
經補償后 ,實現了將純滯后環節移到閉環控制回
路之外,從而有效地消除了純滯后對控制系統的影響。拉氏變換的位移定理說明,ets僅將控制作用在時間上推移了一個時間t::,控制系統的過渡過程及其他性能指標都與對象特性為幾Gc(S)時完全相同。顯然,Smith控制方法的前提是必須確切地知道被控對象的數學模型,在此基礎上才能建立精確的預估模型。












評論