IEEE 1451.4混合模式接口(MMI)智能變送器數字驅動電

驗證
圖6所示電路采用圖7所示附加電路進行測試。1-Wire主控器件為DS9097U-S09,它基于DS2480B驅動器芯片。為確保穩定,正電壓(V+)設置為3.4V。1-Wire主控工作在5V,不符合MAX4561模擬開關的電壓要求(信號電壓不得高于供電電壓)。這解釋了TP2上的干擾,但對電路功能沒有其它不利影響。
復位/在線檢測周期
圖8所示為TP2 (頂部)、TP4 (中間)和TP6 (底部)信號。由于傳感器網絡中存在二極管,當從器件應答脈沖有效時,不能完全達到0V電平。底部波形顯示了清晰的應答脈沖。TP6處的正向幅值對應于V+ 3.4V。
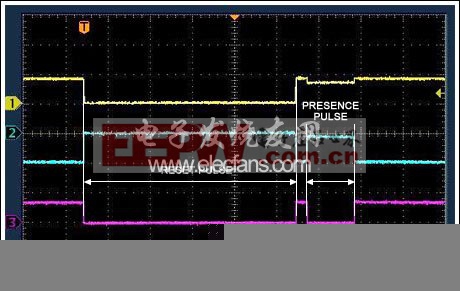
圖8. 復位/在線檢測
讀時隙
圖9所示的節點與之前相同(TP2 = 頂部,TP4 = 中間,TP6 = 底部)。第一個時隙讀1,第二個時隙讀0。
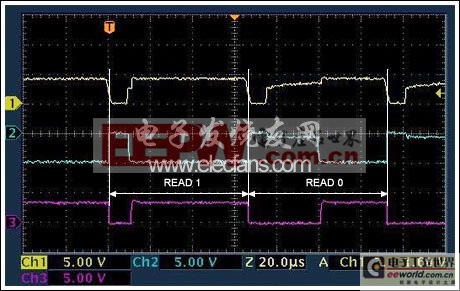
圖9. 通信時隙
總結
當微控制器作為1-Wire主控,采用獨立的端口進行讀、寫操作時,可以采用本文介紹的電路。但是,產生時隙和復位/在線檢測信號的應用軟件具有嚴格的定時要求,可能必須采用匯編語言編程。利用雙向1-Wire驅動器芯片的附加電路,允許使用高級語言開發應用軟件。
由于其異步工作方式,當主控停止拉低1-Wire總線時,附加電路會引起尖峰脈沖。讀0時,尖峰脈沖觸發驅動器的有源上拉,造成驅動器上拉和MAX4561下拉之間的沖突。因此,當使用DS2482驅動器時,應該關閉有源上拉。尖峰脈沖也是雙向1-Wire驅動器附加電路不能支持主控側1-Wire從器件的原因。






評論