PLC的PID運(yùn)算及運(yùn)動(dòng)控制探討

比例積分控制(PI):
積分的存在是針對比例控制要不就是有差值要不就是振蕩的這種特點(diǎn)提出的改進(jìn),它常與比例一塊進(jìn)行控制,也就是PI控制。
其公式有很多種,但大多差別不大,標(biāo)準(zhǔn)公式如下:
u(t) = Kp*e(t) + Ki∑e(t) +u0
u(t)——輸出
Kp——比例放大系數(shù)
Ki——積分放大系數(shù)
e(t)——誤差
u0——控制量基準(zhǔn)值(基礎(chǔ)偏差)
大家可以看到積分項(xiàng)是一個(gè)歷史誤差的累積值,如果光用比例控制時(shí),我們知道要不就是達(dá)不到設(shè)定值要不就是振蕩,在使用了積分項(xiàng)后就可以解決達(dá)不到設(shè)定值的靜態(tài)誤差問題,比方說一個(gè)控制中使用了PI控制后,如果存在靜態(tài)誤差,輸出始終達(dá)不到設(shè)定值,這時(shí)積分項(xiàng)的誤差累積值會(huì)越來越大,這個(gè)累積值乘上Ki后會(huì)在輸出的比重中越占越多,使輸出u(t)越來越大,最終達(dá)到消除靜態(tài)誤差的目的。
PI兩個(gè)結(jié)合使用的情況下,我們的調(diào)整方式如下:
1、先將I值設(shè)為0,將P值放至比較大,當(dāng)出現(xiàn)穩(wěn)定振蕩時(shí),我們再減小P值直到P值不振蕩或者振蕩很小為止(術(shù)語叫臨界振蕩狀態(tài)),在有些情況下,我們還可以在些P值的基礎(chǔ)上再加大一點(diǎn)。
2、加大I值,直到輸出達(dá)到設(shè)定值為止。
3、等系統(tǒng)冷卻后,再重上電,看看系統(tǒng)的超調(diào)是否過大,加熱速度是否太慢。
通過上面的這個(gè)調(diào)試過程,我們可以看到P值主要可以用來調(diào)整系統(tǒng)的響應(yīng)速度,但太大會(huì)增大超調(diào)量和穩(wěn)定時(shí)間;而I值主要用來減小靜態(tài)誤差。
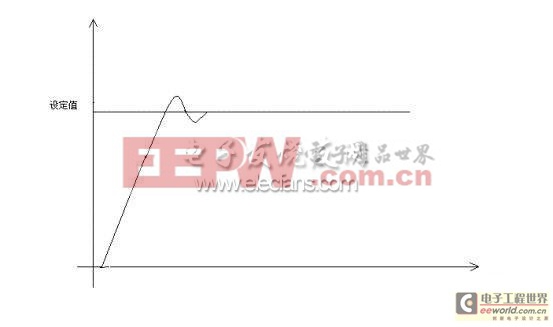
標(biāo)準(zhǔn)的PID公式在溫控等響應(yīng)較慢的系統(tǒng)中會(huì)存在積分項(xiàng)導(dǎo)致過沖的情況,這是因?yàn)樵陂_始加熱后,盡管這時(shí)輸出已調(diào)整最大(比方說固態(tài)繼電器的PWM輸出已是100%開了)但這時(shí)的溫度仍然只能緩慢上升,這時(shí)的積分項(xiàng)會(huì)增加得很快,當(dāng)溫度達(dá)到設(shè)定值后,這時(shí)盡管比例項(xiàng)已輸出為0,但是積分項(xiàng)仍然會(huì)因?yàn)槠淅鄯e值很高而有較大的輸出,導(dǎo)致溫度超調(diào)。
在德維森的V80中,通過改進(jìn)的遇限消弱積分法等措施很好的解決了這個(gè)問題,使積分項(xiàng)在輸出全開時(shí)停止積分,減少了積分對于這種大時(shí)延系統(tǒng)的影響。
PID控制:
因?yàn)镻I系統(tǒng)中的I的存在會(huì)使整個(gè)控制系統(tǒng)的響應(yīng)速度受到影響,為了解決這個(gè)問題,我們在控制中增加了D微分項(xiàng),微分項(xiàng)主要用來解決系統(tǒng)的響應(yīng)速度問題,其完整的公式如下:
u(t) = Kp*e(t) + Ki∑e(t) + Kd[e(t) – e(t-1)]+u0
在模擬電路中的微分常數(shù)是與特征頻率相關(guān)系的,而在數(shù)字離散PID中的微分項(xiàng)實(shí)際上是有一些問題的,因?yàn)槠渲挥?jì)算了兩次誤差的差值,而實(shí)際的模擬PID或者用戶需要的理想微分公式應(yīng)該是要對其進(jìn)行展寬的,只有展寬的D值才能真正的起到很好的效果。微分項(xiàng)在控制系統(tǒng)中起到減少超調(diào)降低振蕩的作用,但因?yàn)槲⒎猪?xiàng)本身對于干擾很敏感,所以在使用微分項(xiàng)時(shí)要慎重。
在PID的調(diào)試過程中,我們應(yīng)注意以下步驟:
1、 關(guān)閉I和D,加大P,使其產(chǎn)生振蕩;
2、 減小P,找到臨界振蕩點(diǎn);
3、 加大I,使其達(dá)到目標(biāo)值;
4、 重新上電看超調(diào)、振蕩和穩(wěn)定時(shí)間是否吻合要求;
5、 針對超調(diào)和振蕩的情況適當(dāng)?shù)脑黾右恍┪⒎猪?xiàng);
6、 注意所有調(diào)試均應(yīng)在最大爭載的情況下調(diào)試,這樣才能保證調(diào)試完的結(jié)果可以在全工作范圍內(nèi)均有效;
位置PID與增量PID:
前面我們所說的PID公式均是位置PID,也稱為全量PID,這在溫控、閥門控制、水泵控制中最常用到,另一種PID公式稱之為增量PID其公式如下:
△u(t) = u(t) – u(t-1)
這在運(yùn)動(dòng)控制中最常使用,其輸出是兩次PID運(yùn)算結(jié)果的差值,一般的步進(jìn)或者伺服電機(jī)的位置控制可以采用這種方式。
二十一、運(yùn)動(dòng)控制
運(yùn)動(dòng)控制是近些年的熱門,精密定位、恒速控制、恒力矩控制等在各種裝備中的應(yīng)用越來越廣泛,這對于控制器的要求也越來越









評(píng)論