基于元胞自動機的增強現(xiàn)實標(biāo)記識別算法

根據(jù)式(1),c=(0,1,…, )其中開始點為隨機選擇的。實驗證明,隨機選擇的效果比固定選擇,如邊界的情況要好一些。算法采用定值型的邊界。保障演化運算不超過矩形空間。
2.2 演化規(guī)則
(1)先判斷是否是邊緣點。由邊緣定義可知,如果某一點狀態(tài)與其近鄰點中大部分點 的狀態(tài)相異 ,就是梯度變 化明顯,那這個點就可以認為是邊緣點,否則就認為是背景點,也就是非邊緣點。基于此理論,按如下規(guī)則來判斷邊緣點位置。
![]()
(2)判斷是否是邊 的點,可 以有兩種判 斷方 法,從 圖 1可知,標(biāo)記是由一個固定寬度的正方形構(gòu)成的。設(shè)標(biāo)記的寬度為d,黑色標(biāo)記帶的寬度為n,則可用如下的規(guī)則判斷是否是正方形邊上 的點。即必須是邊緣點并且滿足連續(xù) x或 Y方向上n個都是邊緣點。或者滿足連續(xù) x或 Y方向上 d個都是同等灰度的。如 式(4)和(5)表示


(3)判斷是否是頂點,如是頂點必須滿足是邊上的點并且滿足連續(xù) x或 Y方向上n個都是 同等灰度的。如式(6)所示

(4)內(nèi)部特征點必須滿足是邊緣點且不是邊點,如下
![]()
(5)系統(tǒng)結(jié)束條件是非常重要的,不然根據(jù)現(xiàn)在對 CA的研究,是很容易陷入混沌狀態(tài)的 。所以必須設(shè)置結(jié)束條件,根據(jù)應(yīng)用,結(jié)束條件是找到所有頂點并且特征點的數(shù) 目滿足特 征識別 的要求 。如下所示:
![]()
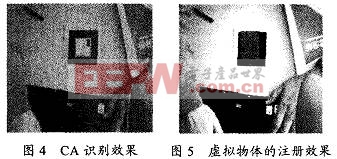
3 實驗結(jié)果
ARTOOLKIT是一種高效的AR開發(fā)平臺。其標(biāo)記識別采用傳統(tǒng)方法,作者利用這個平臺,改寫了標(biāo)記識別部分的算法,取得了較好的效果。在同一背景和相同PC及相機的情況下, 比較實驗結(jié)果如表 1、表 2,以及圖4、圖5所示。可見采用 CA模型的系統(tǒng)在識別效果很好的情況下實時性有了很大提高。


4 結(jié)束語
CA方法由于采用了二值運算,并且演化步驟有限,因此算法的效率是很高的,能夠較好的滿足AR系統(tǒng)實時處理的要求,可預(yù)留更多的時間給渲染程序。當(dāng)然,由于 CA在AR中的應(yīng)用才剛剛起步,CA算法應(yīng)該還可以應(yīng)用在AR系統(tǒng)的很多地面,如坐標(biāo)系變換、光照處理等,這些還有待進一步的研究。

評論