基于聲卡的QPSK信號的實時軟解調(diào)

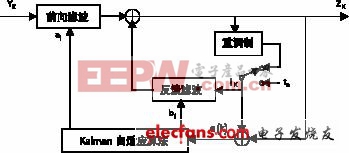
由圖5可以看出,DFE均衡器包含兩個橫向濾波器,一個橫向濾波器用于線性的前向濾波處理,其判決結(jié)果反饋給另一個橫向濾波器。如果前面的判決是正確的,則反饋濾波器就能消除由前面碼元所造成的串?dāng)_。反饋濾波器的抽頭系數(shù)由包括前向濾波器所造成的信道沖激響應(yīng)拖尾所決定。不難理解,只要誤碼率小于1/2,原則上就能保證收斂。
圖中前向濾波器為M階,反饋濾波器為N階;tn為訓(xùn)練序列;YK為前向濾波器的輸入,ai為其抽頭系數(shù);IK為反饋濾波器的輸入,bi為其抽頭系數(shù);ZK為DFE的輸出;e(k)為誤差信號。均衡器工作時,總是先由接收到的同步序列或訓(xùn)練序列tn等已知序列進行訓(xùn)練。在訓(xùn)練期間,DFE均衡器將內(nèi)部產(chǎn)生的理想信號作為反饋輸入信號,由LMS或RLS算法對信道進行估計,同時調(diào)整前向與反饋濾波器的抽頭系數(shù),收斂到均方誤差最小。當(dāng)殘差足夠小時,均衡器被切換到直接判決模式,即由判決符號重調(diào)制生成的參考信號作為反饋輸入,均衡器將繼續(xù)工作在均方誤差最小狀態(tài)。
由圖5可知,
令XT(k)=YK,YK+1,...,YK+M-1,IK-1,IK-2,...,IK-N)
WT(k)=(a1,a2, ..., aM,b1,b2, ...,bN)
其中,T表示轉(zhuǎn)置,則誤差信號e(k)表示如下。
e(k)=IK-ZK=IK-WT(k-1)X(k)
Kalman算法的精髓在于,已知W(k-1),遞推計算W(k),其遞推步驟如下。
初始化:0ω1;W(0)=0;P(0)=I,I表示單位矩陣。
for k=1 to n do :e(k)=I(k)-XT(k)W(k-1)
K(k)= P(k-1)X*(k)
ω+XT(k)P(k-1)X*(k)
P(k)= [p(k-1)-K(k)XT(k)P(k-1)]
W(k)=W(k-1)+K(k)e(k)
其中,K(k)為卡爾曼增益向量,P(k)為X(k)的協(xié)方差矩陣。均衡器系數(shù)隨時間改變的量等于誤差e(k)乘以卡爾曼增益向量K(k)。因為是M+N維的,所以每一個抽頭系數(shù)實際上受到K(k)的一個元素的控制,從而獲得快速收斂。
實時測試結(jié)果



評論