數字基帶芯片揭秘:高靈敏度接收機跟蹤環路設計

分別表示鑒相器的增益系數和鑒相特性函數。GPS C/A碼的碼長為L = 1 023,BD C/A碼的碼長為L = 2 046,碼元寬度為tc =20 ms,其相關函數為:
由此可得鑒相器的鑒相特性函數:
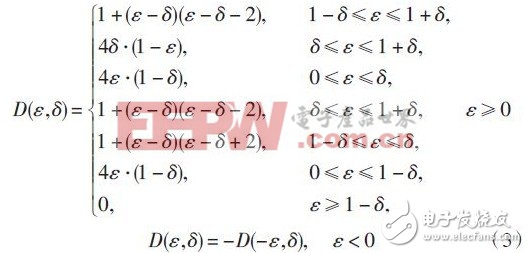
鑒相特性函數為相關間隔與碼相位偏差的函數。
若定義(-δ,δ) 為鑒相線性范圍,鑒相特性函數在ε = 0 處的斜率D′(ε,δ) 為DDLL環的鑒相增益,Dmax (ε,δ) 為跟蹤牽引范圍。
1.3 載波跟蹤環路設計
載波的同步包括了捕獲和跟蹤兩個過程,載波捕獲即多普勒頻移的粗略估計已由快捕通道的捕獲算法完成,而精確的載波相位及多普勒頻移跟蹤則通過反饋跟蹤控制環路實現。本方案采用一種非相干的FLL環--叉積自動頻率跟蹤環(CPAFC)加鎖相跟蹤算法作為載波跟蹤方法。在通過捕獲算法進行偽碼捕獲后,載波多普勒頻移范圍被“牽引”到了500 Hz,為了使多普勒頻移進入叉積鑒頻器的線性工作范圍,算法上首先采用叉積鑒頻器將頻率從幾百赫茲降到幾赫茲,然后利用鎖相環進行精確的頻率跟蹤。
叉積自動頻率跟蹤環鑒頻算法為:
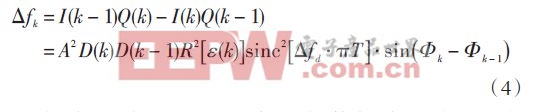
假定連續量測過程中調制數據位不變,即有D(k)D(k - 1) = 1.在預檢積分時間內載體機動造成的頻率偏移可視為恒值,則有Δfd ≡ Δfd (k) = Δfd (k - 1) 成立。而由于Φk = Δfd (k) - tk + Φ0 ,則:

輸出與單位時間間隔內的相位變化成正比,可以用此輸出量控制載波DCO 以達到頻率跟蹤的目的。該算法上要求在同一數據位內計算,在信噪比較低的情況下仍能取得較好的性能[7]。
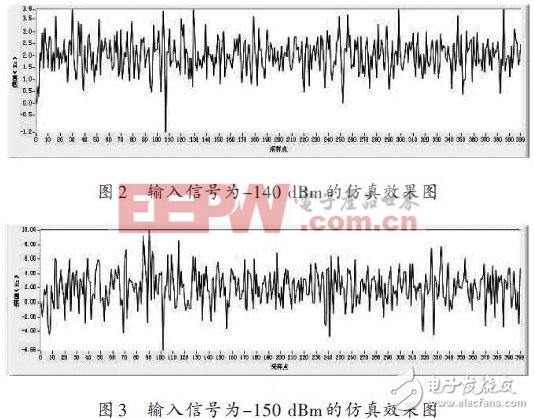
設定相干積分時間為20 ms,載波固定頻偏為2 Hz,環路帶寬為10 Hz,當輸入信號由-140 dBm 減弱至-160 dBm 時的仿真效果圖如圖2~圖5所示。
由圖2~圖5 可知,當輸入信號功率小于-150 dBm時,采用傳統的環路跟蹤策略已經不能實現穩定的跟蹤,必須要設計新的跟蹤方法。




評論