在下一“驅動”設計中支持所有工業以太網標準

引言
工業以太網成為工廠自動化的主流技術,是有多方面原因的。而沒有引起同樣重視的是,需要在供應商系統中實現這一通信技術。而事實上,您怎樣實現這一需求越來越大的功能對于您的系統成本、產品外形以及功耗指標會有很大的不同。本文從工廠自動化供應商開發從機系統的角度出發,介紹實現工業以太網的各種選擇,例如 I/O 模塊和驅動等從機系統。
這些 OEM 面臨的難題并不常見,因此,有很好的理由來檢查從機系統體系結構。供應商不是針對某一協議來設計從機系統。他們必須支持可以在工廠中實現的任何標準,而不能指定某一種協議。他們的系統必須適應任何一種協議。
開發的從機協議新標準也有獨特的硬件特性。事實上,他們不能使用標準 MAC 實現,這會面臨少見的難題,影響對實現平臺的選擇。
工業以太網簡介
一開始,以太網 ——10 Mbps 最初的以太網、100 Mbps 的快速以太網,以及 1 Gbps 的千兆以太網,是在共享介質上在器件之間傳送信號,都不能適應工業應用。而快速以太網 (100 Mbps) 的出現,其交換模式支持全雙工功能,意味著可以在兩個器件之間構建點對點鏈接,使得以太網能夠用于大部分工業應用中。所有工業以太網協議都需要作出一定程度的判決,傳統上是通過使用軟件協議堆棧來解決的。
對速度的要求 ( 或者在這一案例中,延時 )
我們都知道,工廠自動化系統有實時響應要求。那么,“ 實時 ” 到底是什么 ? 答案是這取決于應用類型。有時候,按照數百毫秒來衡量,而有時候按照微秒來衡量。有不同的設計方法使得通信協議能夠滿足不同的延時要求。
如圖 1 所示,PHY 層通常是獨立的模擬器件。但是,可以在數字邏輯器件中實現其他功能,由處理器針對協議棧以及定制應用來運行軟件。而所有的工業以太網協議都需要特殊的軟件堆棧,某些新協議 ( 圖中右側所示 ) 在介質訪問控制 (MAC) 以及交換上使用獨特的非標準設計。
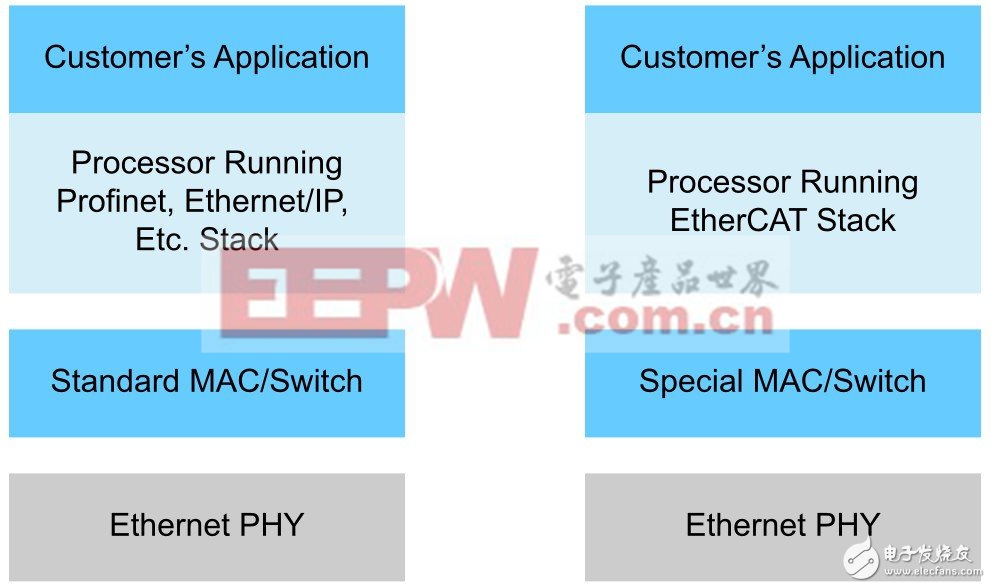
圖 1. 工業以太網協議體系結構
EtherCAT 和 Profinet IRT 是兩種較新的協議,需要特殊的 MAC 設計。特別是EtherCAT 使用了創新的方法,在一個以太網幀中封裝了更多的數據包。多個從機器件的數據被封裝到一個以太網幀中。當從機器件讀取以太網幀時,它必須為自己提取出數據包的內在含義,而忽略其他信息。更重要的是,它必須隨時進行這種提取工作。
當連接了很多從機器件時,對數據包進行提取,以滿足最低延時要求。例如,如果您是網絡上的第 256 個從機器件,會引起一個幀延時而不是 256 幀延時。典型的應用是運動控制以及多軸機器人驅動。
為支持所選擇的協議,從機器件中的 MAC 設計不同于傳統的以太網 MAC,需要 FPGA 或者 ASIC 中的特殊設計。從系統設計的角度看,如果您必須支持標準 MAC 實現以及特殊實現,那么,設計應包含 MAC 設計,或者是硬件可編程的。圖 2 顯示了不同的實時要求是怎樣導致通信協議標準不同體系結構的。
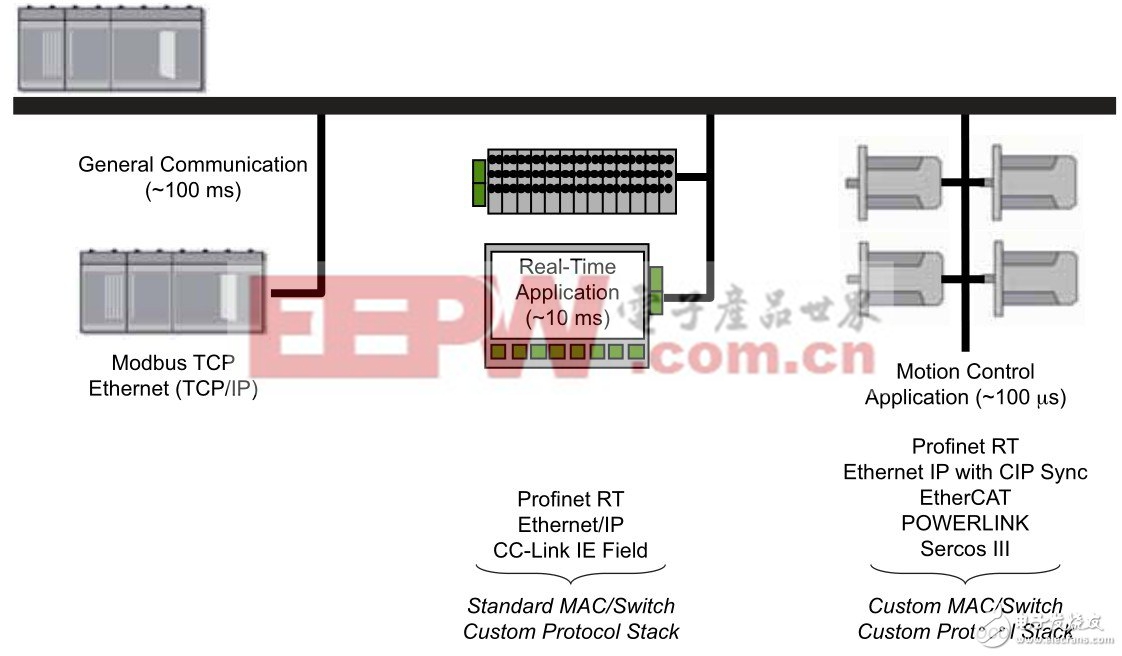
圖 2. 不同的實時要求導致不同的實現

評論