光柵電子細(xì)分電路設(shè)計(jì)

若記錄相鄰兩次Countnum_reg的差值,便可通過(guò)以下的公式計(jì)算光柵讀數(shù)頭移動(dòng)的距離:

式中:N為插值芯片的插值因子,d為光柵柵距。
4.3 二次細(xì)分測(cè)速組件設(shè)計(jì)
光柵讀數(shù)頭的移動(dòng)速度應(yīng)在一定范圍之內(nèi),否則會(huì)造成丟數(shù)等誤差。測(cè)速組件主要對(duì)讀數(shù)頭的移動(dòng)速度進(jìn)行實(shí)時(shí)監(jiān)控,從而實(shí)現(xiàn)過(guò)速報(bào)警。其設(shè)計(jì)過(guò)程與二次細(xì)分辨向組件類似。移動(dòng)速度的計(jì)算公式如下:
式中:d為光柵柵距,f為插值芯片輸出正交信號(hào)的頻率,
N為插值芯片的插值因子,n為t時(shí)間內(nèi)正交信號(hào)的個(gè)數(shù)。由此可知,只要測(cè)出頻率f即可求得移動(dòng)速度。
寄存器描述文件中定義了4個(gè)寄存器,如表1所列。

任務(wù)邏輯設(shè)計(jì)采用測(cè)周期的方法,即根據(jù)Div_reg中的分頻因子對(duì)待測(cè)信號(hào)tclk進(jìn)行分頻,在分頻后信號(hào)的高電平內(nèi)記錄標(biāo)準(zhǔn)信號(hào)sclk的個(gè)數(shù),并在其下降沿將計(jì)數(shù)值存到COUnt_reg中。同時(shí),在其低電平內(nèi)將Countready_reg置1,通知AVaIon主設(shè)備計(jì)數(shù)值已就緒。待測(cè)頻率的計(jì)算公式如下:
該方法可能會(huì)產(chǎn)生±1個(gè)標(biāo)準(zhǔn)脈沖的測(cè)量誤差,由于系統(tǒng)標(biāo)準(zhǔn)頻率與待測(cè)正交信號(hào)相比為高頻信號(hào),因此能實(shí)現(xiàn)高精度的頻率測(cè)量。
4.4 LCD控制組件的設(shè)計(jì)
本系統(tǒng)中使用的LCD為128×64的點(diǎn)陣黑白屏,其內(nèi)嵌控制器為KS0107/KS0108。該液晶模塊的D/I引腳用于指示模塊處理數(shù)據(jù)/命令;R/W引腳控制讀/寫(xiě)操作;EN引腳為使能信號(hào),CSl/CS2為屏幕的左右半屏控制器片選信號(hào)。
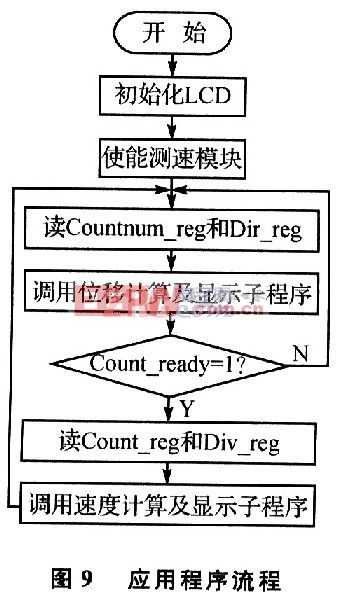
本系統(tǒng)在NiosII IDE開(kāi)發(fā)環(huán)境中設(shè)計(jì)應(yīng)用程序,其程序流程如圖9所示。
5 結(jié)論
①與傳統(tǒng)的分立元件細(xì)分電路相比,本系統(tǒng)中使用了專用的插值芯片IC—NV,不但提高了系統(tǒng)集成度,而且在簡(jiǎn)化PCB設(shè)計(jì)的同時(shí)提高了細(xì)分?jǐn)?shù)。NiosII嵌入式處理器使用,既提高了系統(tǒng)性能,又降低了費(fèi)用。利用Component Editor工具設(shè)計(jì)的二次細(xì)分辨向模塊、測(cè)速模塊及LCD控制模塊,可以隨時(shí)根據(jù)需要更改驅(qū)動(dòng)程序并可重復(fù)利用,實(shí)現(xiàn)了系統(tǒng)的集成和模塊化。
②仿真結(jié)果表明,該系統(tǒng)設(shè)計(jì)簡(jiǎn)單靈活,穩(wěn)定性高,實(shí)時(shí)性強(qiáng),可通過(guò)調(diào)節(jié)插值芯片的插值數(shù)實(shí)現(xiàn)高達(dá)64倍的細(xì)分。



評(píng)論