焊接項目利用機器人將12個工作小時壓縮到45分鐘


圖 1:全自動機器人焊接工作站,所有操作由 AutomationDirect 生產(chǎn)力 PLC 協(xié)調(diào),同步焊接過程、機器人運動和夾具定位。來源:Properly Works
當(dāng)一家在焊接和鋼鐵制造方面享有盛譽的公司獲得了一份為橋梁建設(shè)提供圍欄的合同時,時間緊迫。面對在 90 周內(nèi)制造超過 3 英里圍欄的艱巨任務(wù),該公司轉(zhuǎn)向了 Properly Works,一家在自動化和機器人技術(shù)優(yōu)化制造運營方面有著卓越記錄的系統(tǒng)集成商,尋求幫助開發(fā)一個解決方案,該方案不僅能夠縮短整體項目時間,而且能保證高質(zhì)量的成果。
典型的橋梁圍欄段由 16 個鋼制柵欄組成,并用超過 140 個 welds 固定。手動完成時,每個段需要大約 10 小時進行設(shè)置和焊接。
憑借在工業(yè)焊接和鋼結(jié)構(gòu)制造項目方面的多年經(jīng)驗,紐約蘭開斯特的 Seibel Modern 公司知道,成功的關(guān)鍵在于最大化效率。認識到自動化將給這個繁瑣的過程帶來優(yōu)勢,工作開始利用協(xié)作焊接機器人和開發(fā)自動化夾具來提高效率。
最初計劃是使用帶有焊接器的桌面式機械臂,但很快就確定需要更多的自動化。紐約埃爾馬中心的 Properly Works 通過與圍欄制造商合作,將以前獨立的系統(tǒng)集成到一個完全自動化的機器人工作單元(圖 1)中。
差異是不可否認的——時間減少了驚人的12-1,并且額外的好處是減少了50%的修整工作。為了更好地欣賞成功的結(jié)果,我們將更仔細地看看使其成為可能的方法。
協(xié)作者彌合知識差距
隨著時間的流逝,這將是一個協(xié)作項目。Properly Works 和 Seibel Modern 合作制定規(guī)范,Seibel 定義了焊接幾何形狀和需求以及夾具,而 Properly Works 應(yīng)用傳感器和自動化以實現(xiàn)最佳操作和安全。
依托其金屬加工專業(yè)知識,Seibel Modern 創(chuàng)建了由 Properly Works 的伺服電機驅(qū)動的 racks-and-pinion 機構(gòu)供電的焊接夾具,以定位機器人進行焊接。該夾具包括夾緊和水平到垂直定位使用液壓提升器。
與機器人焊接臂的桁架定位系統(tǒng)的運動同步是設(shè)計中的核心要求。
焊接項目需要協(xié)調(diào)生產(chǎn)
將每個獨立系統(tǒng)組合在一起需要一個周密的集成策略。先進的數(shù)字焊接器不僅需要與智能機器人通信,還需要與控制焊接夾具、工作站安全系統(tǒng)和操作員控制系統(tǒng)的系統(tǒng)通信。
設(shè)計還需要能夠適應(yīng)不同的圍欄段配置。可編程邏輯控制器(PLC)被確定為該應(yīng)用的理想指揮官,協(xié)調(diào)每個控制子系統(tǒng)的運動。
作為獨立的系統(tǒng)集成商(SI),Properly Works 使用各種品牌的機器人、焊接器、 運動控制系統(tǒng)和一般的工業(yè)自動化產(chǎn)品來部署這些系統(tǒng)。
當(dāng)沒有預(yù)先定義的工作要求時,Properly Works 通常傾向于選擇 AutomationDirect 的產(chǎn)品組合進行自動化和運動控制,因為其產(chǎn)品范圍全面、選擇、使用和支持都方便,并且價格/性能比 exceptional。
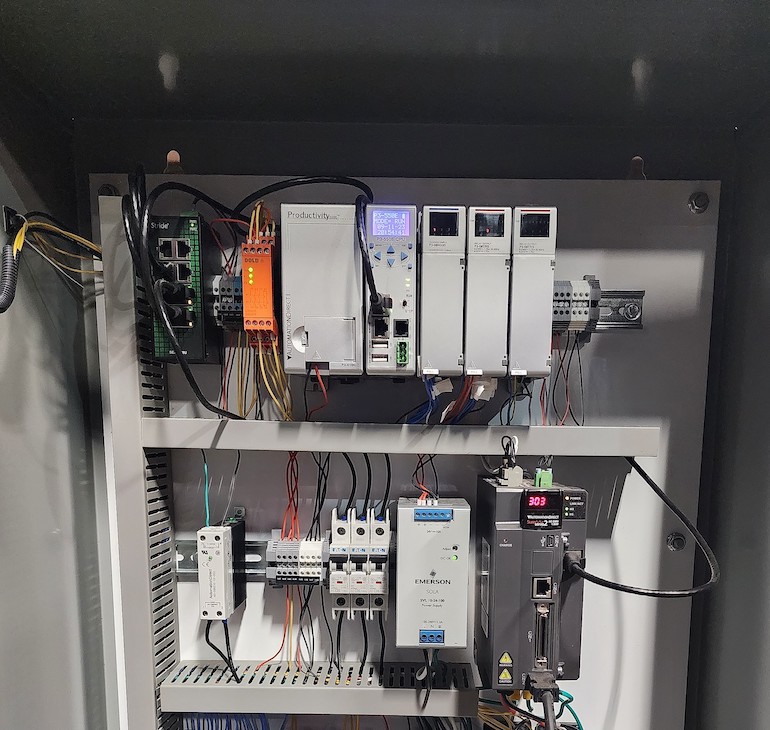
圖 2:AutomationDirect Productivity 3000 PLC 提供了編程、內(nèi)存和通信功能,以協(xié)調(diào) SureServo2 驅(qū)動器與機器人焊接器和其他自動化設(shè)備。來源:Properly Works
為此項目,AutomationDirect 的 Productivity 3000 PLC 被選為機器人工作單元的控制器,因其多功能性和可擴展性(圖 2)。眾多功能和功能特性,加上大存儲能力和 EtherNet/IP 通信,都促成了這一決定。該 PLC 將通過 AutomationDirect SureServo2 系統(tǒng)協(xié)調(diào)運動。
通過硬接線輸入/輸出(I/O)信號,以及 IO-Link 連接的離散信號,以及以太網(wǎng)和串行數(shù)字通信,PLC 輕松地與所有機器人功能、基于數(shù)字的焊接機、安全系統(tǒng)、液壓操作的焊接夾具,以及用于定位機器人手臂的運動控制龍門系統(tǒng)進行接口。
SureServo2 驅(qū)動小齒輪,移動龍門架,Productivity PLC 具備強大的處理能力和原生的運動控制功能,以精確指揮移動,并與自動化和機器人組件無縫集成和協(xié)調(diào)。
PLC 還與 AutomationDirect C-more 人機界面 (HMI) 交互,以實現(xiàn)系統(tǒng)的完整可視化。
在任何機器人工作單元中, 安全 至關(guān)重要。盡管 Productivity PLC 沒有原生的安全功能,但它與專門的安全組件接口,這些組件通過硬接線創(chuàng)建工作單元安全電路。
設(shè)計中使用了多種安全產(chǎn)品,包括用于監(jiān)控安全電路的 Dold 安全繼電器 ,用于檢測進入受限區(qū)域的 Datasensing 安全光柵,以及 蘑菇式按鈕 和 拉線式安全開關(guān) 緊急停止 (e-stop) 設(shè)備。
電纜拉動可以從電纜長度的任何位置觸發(fā),在工作單元內(nèi)部提供一種方便的安全措施,其中急停按鈕可能無法觸及。
為確保成品質(zhì)量,機器人及鋼制圍欄的精確定位對每個圍欄段至關(guān)重要。在焊接過程中,SureServo2 系統(tǒng)控制一個齒輪齒條線性執(zhí)行器,使機器人在 9 英尺的線性行程內(nèi)精確定位。
PLC 管理機器人在線性通道上的位置,以及機器人手臂本身的六個附加運動軸。每個焊接的起止點由 PLC 根據(jù) SureServo2 系統(tǒng)和伺服編碼器傳感器的反饋來確定。為了防止過度行程,施加了軟件限制。










評論