基于加速度的車禍報警系統(tǒng)的設(shè)計與實現(xiàn)

3 系統(tǒng)組成和原理
3.1 總系統(tǒng)組成
系統(tǒng)由車載終端、GPS衛(wèi)星、系統(tǒng)服務(wù)器、Intemet網(wǎng)絡(luò)、網(wǎng)絡(luò)客戶端、手持電話等組成。如圖1所示。本文引用地址:http://www.104case.com/article/202421.htm

3.2 車載終端
車載終端以ATmega128L為核心,集成了加速度傳感器、鍵盤、LCD屏、GSM模塊、GPS模塊、復(fù)位電路、蓄電池、擴展I/O日等,可檢測水平方向和堅直方向的加速度,檢測堅直方向的加速度只是為了防止由于重力加速度的干擾而產(chǎn)生誤報警,車載終端結(jié)構(gòu)圖如圖2所示。
3.2.1 加速度采集
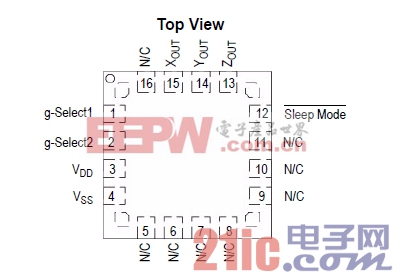
采用的ADI公司的加速度傳感器ADXL001—500BEZ振動與沖擊傳感器,其測量范圍在-500~+500 G之間,該傳感器具有0.2%滿量程范圍的出色非線性度,具有寬帶寬(諧振頻率22 kHz),可工作在-40~+125°,適合苛刻的工業(yè)環(huán)境且無需校準。十分適合系統(tǒng)的需求。
3.2.2 車輛定位
車輛定位采用了HOLUX GR-85智能型衛(wèi)星接收模塊,他采用GSC3F衛(wèi)星定位接收芯片,確保了高的接收靈敏度,內(nèi)部有可充電電池,可以保存星歷數(shù)據(jù),便于快速定位,是一個具備全方位功能的衛(wèi)星定位接收器。串口數(shù)據(jù)輸出,默認波特率為4 800,每秒更新一次GPS全數(shù)據(jù)。把TXA腳和系統(tǒng)mega128單片機串口的RXD腳連接,終端即可得到所需要的年/月/日/時/分/秒/毫秒、當前經(jīng)度、緯度、運動速度、運動
方向等數(shù)據(jù)。
3.3 系統(tǒng)實現(xiàn)
圖3是車載終端主程序流程圖,終端上電后初始化串口0、串口1、從EEPROM中讀取設(shè)置通訊號碼等信息。通過A/D不斷的采集系統(tǒng)的加速度輸入MCU,MCU將不斷的保存獲得的加速度,并進行算法判斷是否應(yīng)發(fā)出報警。系統(tǒng)會每秒產(chǎn)生一個低級中斷讀取一次GPS全數(shù)據(jù)儲存,通過對加速度的判斷,一旦達到發(fā)出報警的條件,便會編輯短信向GSM發(fā)出AT指令,使GSM發(fā)出信息。
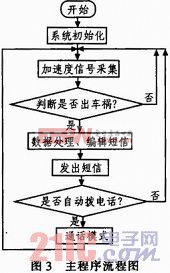
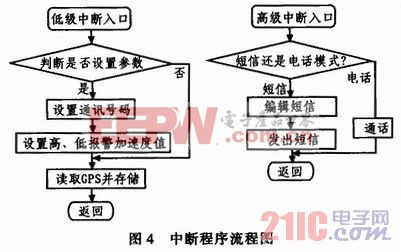
圖4為中斷程序流程圖,低級中斷是定時產(chǎn)生的,也可通過按鍵對各種參數(shù)和號等進行設(shè)置。高級中斷主要為手動報警模式,只要按下短信報警鍵或語音電話報警按鍵,則會立即發(fā)出報警。手動報警在防打劫汽車上也非常有用。


評論