基于STEP FPGA的PCF8591的ADC(I2C)功能驅動

硬件說明
PCF8591是集成了4路ADC和1路DAC的芯片,使用I2C總線通信。
I2C總線是由Philips公司開發的一種簡單、雙向二線制同步串行總線。它只需要兩根線即可在連接于總線上的器件之間傳送信息。主器件用于啟動總線傳送數據,并產生時鐘以開放傳送的器件,此時任何被尋址的器件均被認為是從器件。如果主機要發送數據給從器件,則主機首先尋址從器件,然后主動發送數據至從器件,最后由主機終止數據傳送;如果主機要接收從器件的數據,首先由主器件尋址從器件,然后主機接收從器件發送的數據,最后由主機終止接收過程。這里不做過多的講解,硬件連接如下:
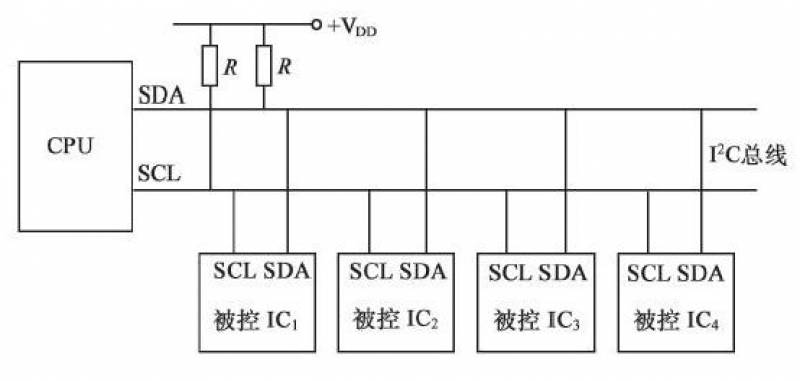
本設計的硬件連接如下
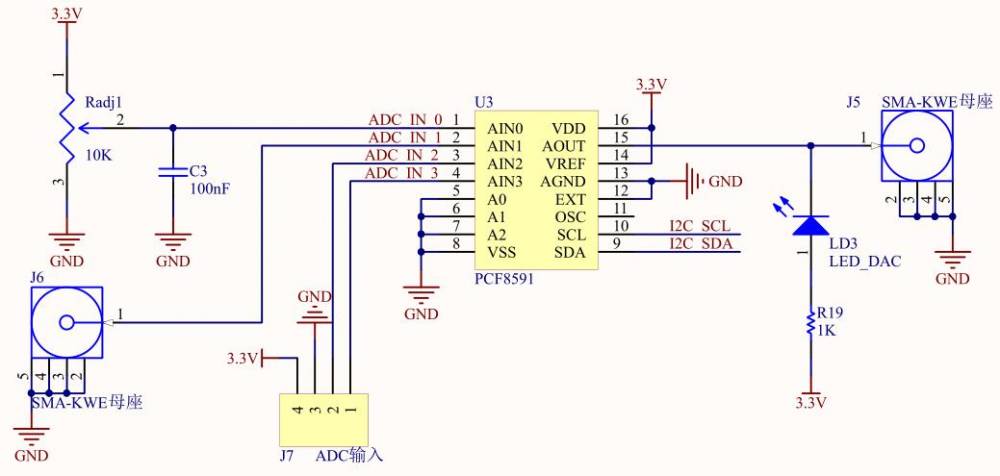
本設計中FPGA作為I2C主設備,PCF8591作為I2C從設備,從設備的地址由固定地址和可編程地址組成,我們的外設底板已將可編程地址A0、A1、A2接地,所以7位地址為7'h48,加上最低位的讀寫控制,所以給PCF8591寫數據時的尋址地址為8'h90,對PCF8591讀數據時的尋址地址為8'h91。如下

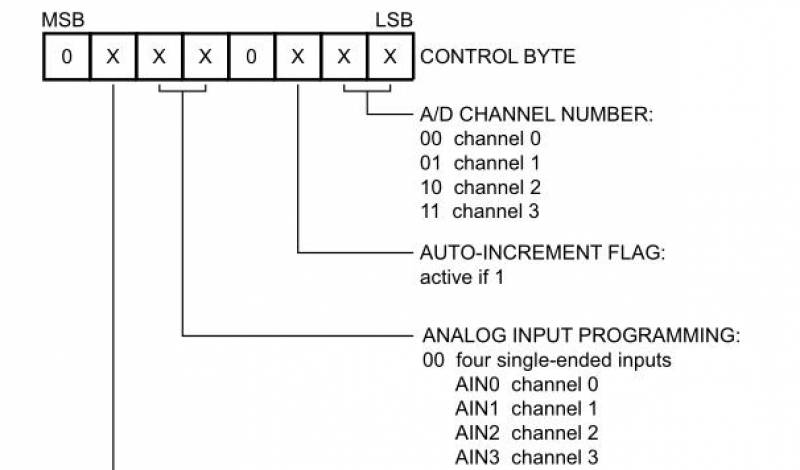
PCF8591集成了很多功能,當需要不同的功能時要對PCF8591做相應的配置,配置數據存儲在名為CONTROL BYTE的寄存器中,下圖展示了寄存器中部分bit的功能,詳細請參考PCF8591的datasheet,本設計中我們只使用通道1的ADC功能,配置數據為8'h01。
本設計中我們需要兩次通信,
第二次的時序如下圖:
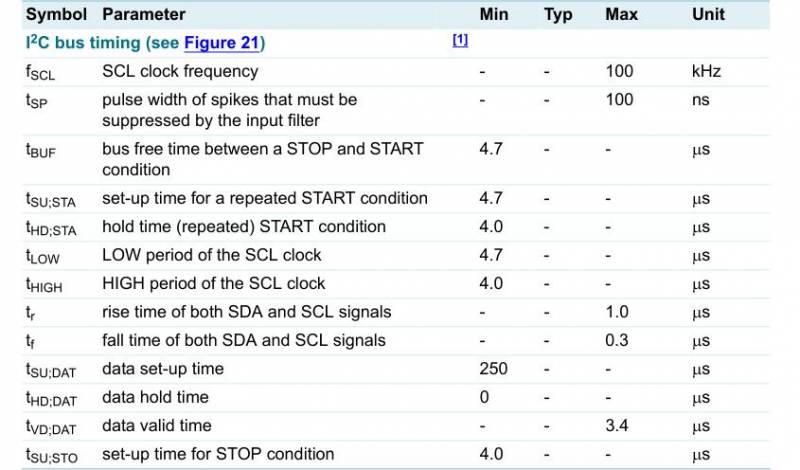
通過上面的介紹大家應該對如何驅動PCF8591進行ADC采樣有了整體的概念,還有一些細節就是I2C通信的時序明細,如下圖

Verilog代碼
// -------------------------------------------------------------------- // >>>>>>>>>>>>>>>>>>>>>>>>> COPYRIGHT NOTICE <<<<<<<<<<<<<<<<<<<<<<<<< // -------------------------------------------------------------------- // Module: ADC_I2C // // Author: Step // // Description: ADC_I2C // // -------------------------------------------------------------------- // Code Revision History : // -------------------------------------------------------------------- // Version: |Mod. Date: |Changes Made: // V1.1 |2016/10/30 |Initial ver // -------------------------------------------------------------------- module ADC_I2C( input clk_in, //系統時鐘 input rst_n_in, //系統復位,低有效 output scl_out, //I2C總線SCL inout sda_out, //I2C總線SDA output reg adc_done, //ADC采樣完成標志 output reg [7:0] adc_data //ADC采樣數據 ) ; parameter CNT_NUM = 15; localparam IDLE = 3'd0; localparam MAIN = 3'd1; localparam START = 3'd2; localparam WRITE = 3'd3; localparam READ = 3'd4; localparam STOP = 3'd5; //根據PCF8591的datasheet,I2C的頻率最高為100KHz, //我們準備使用4個節拍完成1bit數據的傳輸,所以需要400KHz的時鐘觸發完成該設計 //使用計數器分頻產生400KHz時鐘信號clk_400khz reg clk_400khz; reg [9:0] cnt_400khz; always@(posedge clk_in or negedge rst_n_in) begin if(!rst_n_in) begin cnt_400khz <= 10'd0; clk_400khz <= 1'b0; end else if(cnt_400khz >= CNT_NUM-1) begin cnt_400khz <= 10'd0; clk_400khz <= ~clk_400khz; end else begin cnt_400khz <= cnt_400khz + 1'b1; end end reg [7:0] adc_data_r; reg scl_out_r; reg sda_out_r; reg [2:0] cnt; reg [3:0] cnt_main; reg [7:0] data_wr; reg [2:0] cnt_start; reg [2:0] cnt_write; reg [4:0] cnt_read; reg [2:0] cnt_stop; reg [2:0] state; always@(posedge clk_400khz or negedge rst_n_in) begin if(!rst_n_in) begin //如果按鍵復位,將相關數據初始化 scl_out_r <= 1'd1; sda_out_r <= 1'd1; cnt <= 1'b0; cnt_main <= 4'd0; cnt_start <= 3'd0; cnt_write <= 3'd0; cnt_read <= 5'd0; cnt_stop <= 1'd0; adc_done <= 1'b0; adc_data <= 1'b0; state <= IDLE; end else begin case(state) IDLE:begin //軟件自復位,主要用于程序跑飛后的處理 scl_out_r <= 1'd1; sda_out_r <= 1'd1; cnt <= 1'b0; cnt_main <= 4'd0; cnt_start <= 3'd0; cnt_write <= 3'd0; cnt_read <= 5'd0; cnt_stop <= 1'd0; adc_done <= 1'b0; state <= MAIN; end MAIN:begin if(cnt_main >= 4'd6) cnt_main <= 4'd6; //對MAIN中的子狀態執行控制cnt_main else cnt_main <= cnt_main + 1'b1; case(cnt_main) 4'd0: begin state <= START; end //I2C通信時序中的START 4'd1: begin data_wr <= 8'h90; state <= WRITE; end //A0,A1,A2都接了GND,寫地址為8'h90 4'd2: begin data_wr <= 8'h00; state <= WRITE; end //control byte為8'h00,采用4通道ADC中的通道0 4'd3: begin state <= STOP; end //I2C通信時序中的START 4'd4: begin state <= START; end //I2C通信時序中的STOP 4'd5: begin data_wr <= 8'h91; state <= WRITE; end //A0 A1 A2都接了GND,讀地址為8'h91 4'd6: begin state <= READ; adc_done <= 1'b0; end //讀取ADC的采樣數據 4'd7: begin state <= STOP; adc_done <= 1'b1; end //I2C通信時序中的STOP,讀取完成標志 4'd8: begin state <= MAIN; end //預留狀態,不執行 default: state <= IDLE; //如果程序失控,進入IDLE自復位狀態 endcase end START:begin //I2C通信時序中的起始START if(cnt_start >= 3'd5) cnt_start <= 1'b0; //對START中的子狀態執行控制cnt_start else cnt_start <= cnt_start + 1'b1; case(cnt_start) 3'd0: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //將SCL和SDA拉高,保持4.7us以上 3'd1: begin sda_out_r <= 1'b1; scl_out_r <= 1'b1; end //clk_400khz每個周期2.5us,需要兩個周期 3'd2: begin sda_out_r <= 1'b0; end //SDA拉低到SCL拉低,保持4.0us以上 3'd3: begin sda_out_r <= 1'b0; end //clk_400khz每個周期2.5us,需要兩個周期 3'd4: begin scl_out_r <= 1'b0; end //SCL拉低,保持4.7us以上 3'd5: begin scl_out_r <= 1'b0; state <= MAIN; end //clk_400khz每個周期2.5us,需要兩個周期,返回MAIN default: state <= IDLE; //如果程序失控,進入IDLE自復位狀態 endcase end WRITE:begin //I2C通信時序中的寫操作WRITE和相應判斷操作ACK if(cnt <= 3'd6) begin //共需要發送8bit的數據,這里控制循環的次數 if(cnt_write >= 3'd3) begin cnt_write <= 1'b0; cnt <= cnt + 1'b1; end else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end end else begin if(cnt_write >= 3'd7) begin cnt_write <= 1'b0; cnt <= 1'b0; end //兩個變量都恢復初值 else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end end case(cnt_write) //按照I2C的時序傳輸數據 3'd0: begin scl_out_r <= 1'b0; sda_out_r <= data_wr[7-cnt]; end //SCL拉低,并控制SDA輸出對應的位 3'd1: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上 3'd2: begin scl_out_r <= 1'b1; end //clk_400khz每個周期2.5us,需要兩個周期 3'd3: begin scl_out_r <= 1'b0; end //SCL拉低,準備發送下1bit的數據 //獲取從設備的響應信號并判斷 3'd4: begin sda_out_r <= 1'bz; end //釋放SDA線,準備接收從設備的響應信號 3'd5: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上 3'd6: begin if(sda_out) state <= IDLE; else state <= state; end //獲取從設備的響應信號并判斷 3'd7: begin scl_out_r <= 1'b0; state <= MAIN; end //SCL拉低,返回MAIN狀態 default: state <= IDLE; //如果程序失控,進入IDLE自復位狀態 endcase end READ:begin //I2C通信時序中的讀操作READ和返回ACK的操作 if(cnt <= 3'd6) begin //共需要接收8bit的數據,這里控制循環的次數 if(cnt_read >= 3'd3) begin cnt_read <= 1'b0; cnt <= cnt + 1'b1; end else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end end else begin if(cnt_read >= 3'd7) begin cnt_read <= 1'b0; cnt <= 1'b0; end //兩個變量都恢復初值 else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end end case(cnt_read) //按照I2C的時序接收數據 3'd0: begin scl_out_r <= 1'b0; sda_out_r <= 1'bz; end //SCL拉低,釋放SDA線,準備接收從設備數據 3'd1: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上 3'd2: begin adc_data_r[7-cnt] <= sda_out; end //讀取從設備返回的數據 3'd3: begin scl_out_r <= 1'b0; end //SCL拉低,準備接收下1bit的數據 //向從設備發送響應信號 3'd4: begin sda_out_r <= 1'b0; a dc_done <= 1'b1; adc_data <= adc_data_r; end //發送響應信號,將前面接收的數據鎖存 3'd5: begin scl_out_r <= 1'b1; end //SCL拉高,保持4.0us以上 3'd6: begin scl_out_r <= 1'b1; adc_done <= 1'b0; end //SCL拉高,保持4.0us以上 3'd7: begin scl_out_r <= 1'b0; state <= MAIN; end //SCL拉低,返回MAIN狀態 default: state <= IDLE; //如果程序失控,進入IDLE自復位狀態 endcase end STOP:begin //I2C通信時序中的結束STOP if(cnt_stop >= 3'd5) cnt_stop <= 1'b0; //對STOP中的子狀態執行控制cnt_stop else cnt_stop <= cnt_stop + 1'b1; case(cnt_stop) 3'd0: begin sda_out_r <= 1'b0; end //SDA拉低,準備STOP 3'd1: begin sda_out_r <= 1'b0; end //SDA拉低,準備STOP 3'd2: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us 3'd3: begin scl_out_r <= 1'b1; end //SCL提前SDA拉高4.0us 3'd4: begin sda_out_r <= 1'b1; end //SDA拉高 3'd5: begin sda_out_r <= 1'b1; state <= MAIN; end //完成STOP操作,返回MAIN狀態 default: state <= IDLE; //如果程序失控,進入IDLE自復位狀態 endcase end default:; endcase end end assign scl_out = scl_out_r; //對SCL端口賦值 assign sda_out = sda_out_r; //對SDA端口賦值 endmodule
小結
本節主要為大家講解了使用I2C驅動PCF8591的ADC功能的原理及軟件設計,需要大家掌握的同時自己創建工程,通過整個設計流程,生成FPGA配置文件加載測試。

評論