STEP FPGA驅動溫度傳感器DS18B20Z

硬件說明
DS18B20是我們日常設計中常用的一款溫度傳感器芯片,只需要一根總線就可以實現通信,非常的方便,我們的STEP-BaseBoard底板上就集成了溫度傳感器DS18B20Z,下面我們就一起來學習一下它的硬件鏈接及驅動方法。
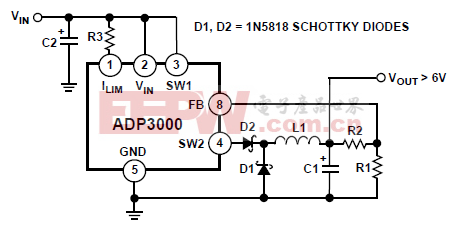
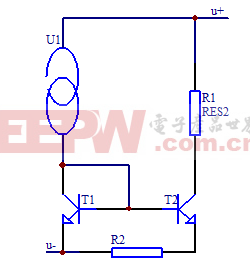
DS18B20Z只有一根總線,硬件電路非常簡單,但是一定記得總線需要做上拉處理,如下圖總線上連接了10K(上拉電阻取值可以一定范圍內自行調整)的上拉電阻,另外我們使用FPGA驅動,一定記得將FPGA對應的管腳同樣作上拉配置,重要的事情說三遍,總線上拉,總線上拉,總線上拉。

聊完硬件連接,接下來簡要介紹如何驅動(更加詳細的信息需要大家參考數據手冊),不同的功能需求對應不同寄存器配置,本設計執行的操作案例如下。
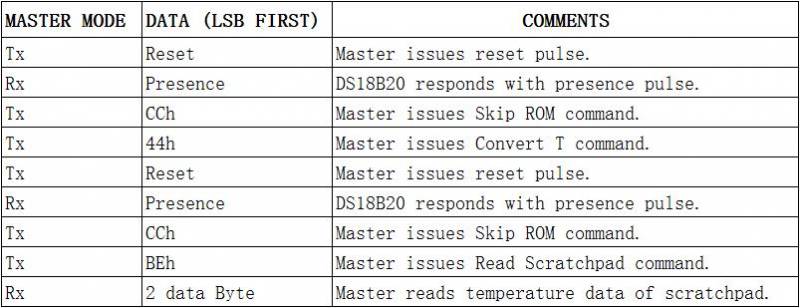
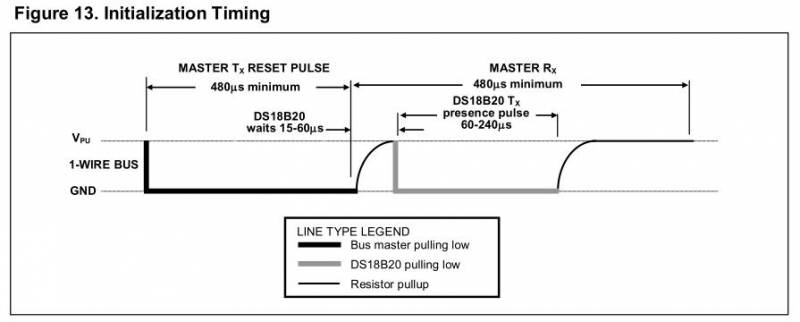
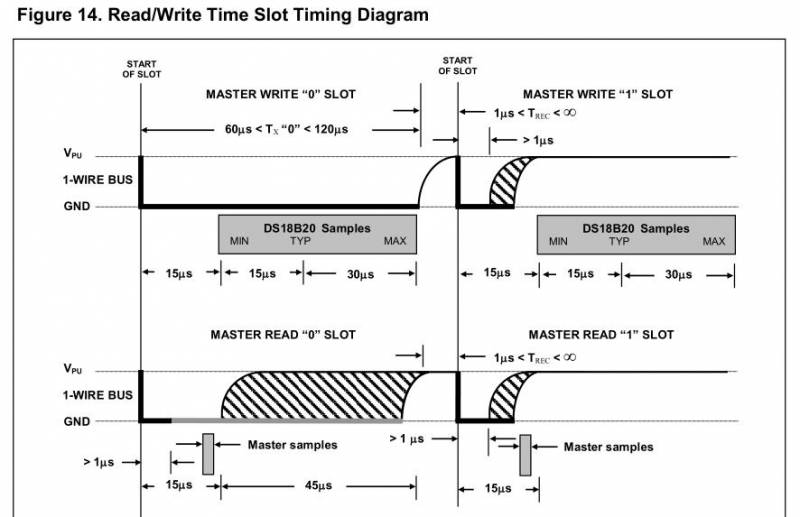
下面為大家展示上述案例中每個環節的時序要求:

Verilog代碼
// -------------------------------------------------------------------- // >>>>>>>>>>>>>>>>>>>>>>>>> COPYRIGHT NOTICE <<<<<<<<<<<<<<<<<<<<<<<<< // -------------------------------------------------------------------- // Module:DS18B20Z // // Author: Step // // Description: Drive DS18B20Z to get temperature code // // -------------------------------------------------------------------- // Code Revision History : // -------------------------------------------------------------------- // Version: |Mod. Date: |Changes Made: // V1.0 |2015/11/11 |Initial ver // -------------------------------------------------------------------- module DS18B20Z( input clk_in, //系統時鐘 input rst_n_in, //系統復位,低有效 inout one_wire, //DS18B20Z傳感器單總線,雙向管腳 output reg [15:0] data_out //DS18B20Z有效溫度數據輸出) ; /* 本設計通過驅動DS18B20Z芯片獲取溫度數據, 需要了解inout類型的接口如何實現雙向通信, 中間涉及各種不同的延時和寄存器指令操作,注釋部分以作簡要說明,更多詳情需參考數據手冊 */ localparam IDLE = 3'd0; localparam MAIN = 3'd1; localparam INIT = 3'd2; localparam WRITE = 3'd3; localparam READ = 3'd4; localparam DELAY = 3'd5; //計數器分頻產生1MHz的時鐘信號 reg clk_1mhz; reg [2:0] cnt_1mhz; always@(posedge clk_in or negedge rst_n_in) begin if(!rst_n_in) begin cnt_1mhz <= 3'd0; clk_1mhz <= 1'b0; end else if(cnt_1mhz >= 3'd5) begin cnt_1mhz <= 3'd0; clk_1mhz <= ~clk_1mhz; //產生1MHz分頻 end else begin cnt_1mhz <= cnt_1mhz + 1'b1; end end reg [2:0] cnt; reg one_wire_buffer; reg [3:0] cnt_main; reg [7:0] data_wr; reg [7:0] data_wr_buffer; reg [2:0] cnt_init; reg [19:0] cnt_delay; reg [19:0] num_delay; reg [3:0] cnt_write; reg [2:0] cnt_read; reg [15:0] temperature; reg [7:0] temperature_buffer; reg [2:0] state = IDLE; reg [2:0] state_back = IDLE; //使用1MHz時鐘信號做觸發完成下面狀態機的功能 always@(posedge clk_1mhz or negedge rst_n_in) begin if(!rst_n_in) begin state <= IDLE; state_back <= IDLE; cnt <= 1'b0; cnt_main <= 1'b0; cnt_init <= 1'b0; cnt_write <= 1'b0; cnt_read <= 1'b0; cnt_delay <= 1'b0; one_wire_buffer <= 1'bz; temperature <= 16'h0; end else begin case(state) IDLE:begin //IDLE狀態,程序設計的軟復位功能,各狀態異常都會跳轉到此狀態 state <= MAIN; //軟復位完成,跳轉之MAIN狀態重新工作 state_back <= MAIN; cnt <= 1'b0; cnt_main <= 1'b0; cnt_init <= 1'b0; cnt_write <= 1'b0; cnt_read <= 1'b0; cnt_delay <= 1'b0; one_wire_buffer <= 1'bz; end MAIN:begin //MAIN狀態控制狀態機在不同狀態間跳轉,實現完整的溫度數據采集 if(cnt_main >= 4'd11) cnt_main <= 1'b0; else cnt_main <= cnt_main + 1'b1; case(cnt_main) 4'd0: begin state <= INIT; end //跳轉至INIT狀態進行芯片的復位及驗證 4'd1: begin data_wr <= 8'hcc; state <= WRITE; end //主設備發出跳轉ROM指令 4'd2: begin data_wr <= 8'h44; state <= WRITE; end //主設備發出溫度轉換指令 4'd3: begin num_delay <= 20'd750000; state <= DELAY; state_back <= MAIN; end //延時750ms等待轉換完成 4'd4: begin state <= INIT; end //跳轉至INIT狀態進行芯片的復位及驗證 4'd5: begin data_wr <= 8'hcc; state <= WRITE; end //主設備發出跳轉ROM指令 4'd6: begin data_wr <= 8'hbe; state <= WRITE; end //主設備發出讀取溫度指令 4'd7: begin state <= READ; end //跳轉至READ狀態進行單總線數據讀取 4'd8: begin temperature[7:0] <= temperature_buffer; end //先讀取的為低8位數據 4'd9: begin state <= READ; end //跳轉至READ狀態進行單總線數據讀取 4'd10: begin temperature[15:8] <= temperature_buffer; end //后讀取的為高8為數據 4'd11: begin state <= IDLE; data_out <= temperature; end //將完整的溫度數據輸出并重復以上所有操作 default: state <= IDLE; endcase end INIT:begin //INIT狀態完成DS18B20Z芯片的復位及驗證功能 if(cnt_init >= 3'd6) cnt_init <= 1'b0; else cnt_init <= cnt_init + 1'b1; case(cnt_init) 3'd0: begin one_wire_buffer <= 1'b0; end //單總線復位脈沖拉低 3'd1: begin num_delay <= 20'd500; state <= DELAY; state_back <= INIT; end //復位脈沖保持拉低500us時間 3'd2: begin one_wire_buffer <= 1'bz; end //單總線復位脈沖釋放,自動上拉 3'd3: begin num_delay <= 20'd100; state <= DELAY; state_back <= INIT; end //復位脈沖保持釋放100us時間 3'd4: begin if(one_wire) state <= IDLE; else state <= INIT; end //根據單總線的存在檢測結果判定是否繼續 3'd5: begin num_delay <= 20'd400; state <= DELAY; state_back <= INIT; end //如果檢測正常繼續保持釋放400us時間 3'd6: begin state <= MAIN; end //INIT狀態操作完成,返回MAIN狀態 default: state <= IDLE; endcase end WRITE:begin //按照DS18B20Z芯片單總線時序進行寫操作 if(cnt <= 3'd6) begin //共需要發送8bit的數據,這里控制循環的次數 if(cnt_write >= 4'd6) begin cnt_write <= 1'b1; cnt <= cnt + 1'b1; end else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end end else begin if(cnt_write >= 4'd8) begin cnt_write <= 1'b0; cnt <= 1'b0; end //兩個變量都恢復初值 else begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end end //對于WRITE狀態中cnt_write來講,執行過程為:0;[1~6]*8;7;8; case(cnt_write) //lock data_wr 4'd0: begin data_wr_buffer <= data_wr; end //將需要寫出的數據緩存 //發送 1bit 數據的用時在60~120us之間,參考數據手冊 4'd1: begin one_wire_buffer <= 1'b0; end //總線拉低 4'd2: begin num_delay <= 20'd2; state <= DELAY; state_back <= WRITE; end //延時2us時間,保證15us以內 4'd3: begin one_wire_buffer <= data_wr_buffer[cnt]; end //先發送數據最低位 4'd4: begin num_delay <= 20'd80; state <= DELAY; state_back <= WRITE; end //延時80us時間 4'd5: begin one_wire_buffer <= 1'bz; end //總線釋放 4'd6: begin num_delay <= 20'd2; state <= DELAY; state_back <= WRITE; end //延時2us時間 //back to main 4'd7: begin num_delay <= 20'd80; state <= DELAY; state_back <= WRITE; end //延時80us時間 4'd8: begin state <= MAIN; end //返回MAIN狀態 default: state <= IDLE; endcase end READ:begin //按照DS18B20Z芯片單總線時序進行讀操作 if(cnt <= 3'd6) begin //共需要接收8bit的數據,這里控制循環的次數 if(cnt_read >= 3'd5) begin cnt_read <= 1'b0; cnt <= cnt + 1'b1; end else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end end else begin if(cnt_read >= 3'd6) begin cnt_read <= 1'b0; cnt <= 1'b0; end //兩個變量都恢復初值 else begin cnt_read <= cnt_read + 1'b1; cnt <= cnt; end end case(cnt_read) //讀取 1bit 數據的用時在60~120us之間,總線拉低后15us時間內讀取數據,參考數據手冊 3'd0: begin one_wire_buffer <= 1'b0; end //總線拉低 3'd1: begin num_delay <= 20'd2; state <= DELAY; state_back <= READ; end //延時2us時間 3'd2: begin one_wire_buffer <= 1'bz; end //總線釋放 3'd3: begin num_delay <= 20'd5; state <= DELAY; state_back <= READ; end //延時5us時間 3'd4: begin temperature_buffer[cnt] <= one_wire; end //讀取DS18B20Z返回的總線數據,先收最低位 3'd5: begin num_delay <= 20'd60; state <= DELAY; state_back <= READ; end //延時60us時間 //back to main 3'd6: begin state <= MAIN; end //返回MAIN狀態 default: state <= IDLE; endcase end DELAY:begin //延時控制 if(cnt_delay >= num_delay) begin //延時控制,延時時間由num_delay指定 cnt_delay <= 1'b0; state <= state_back; //很多狀態都需要延時,延時后返回哪個狀態由state_back指定 end else cnt_delay <= cnt_delay + 1'b1; end endcase end end assign one_wire = one_wire_buffer; endmodule
小結
本節主要為大家講解了DS18B20Z的驅動方法及軟件實現,需要大家掌握的同時自己創建工程,通過整個設計流程,生成FPGA配置文件加載測試。



評論