金屬探測器機器人車輛

埋在地下的地雷對人的生命造成威脅。人工探測和清除這些地雷是一項危險的任務(wù),有時可能會造成事故。在這種情況下,機器人幫助探測地雷。不僅是地雷,這些機器人還可以用來探測地面上的任何其他金屬。這篇文章解釋了使用射頻技術(shù)的金屬探測機器人。在了解這種金屬探測機器人車輛之前,先了解一下金屬探測儀的電路工作原理。
本文引用地址:http://www.104case.com/article/202307/448309.htm無線金屬探測機器人電路原理:
擬議的系統(tǒng)由發(fā)射器和接收器電路組成。發(fā)射器電路傳輸操作機器人所需的命令。接收電路通過射頻接收這些命令,并根據(jù)收到的命令移動機器人。一個金屬探測器與接收器一側(cè)的控制器連接。因此,每當(dāng)檢測到任何金屬時,機器人就會停在那里,蜂鳴器開始響起。
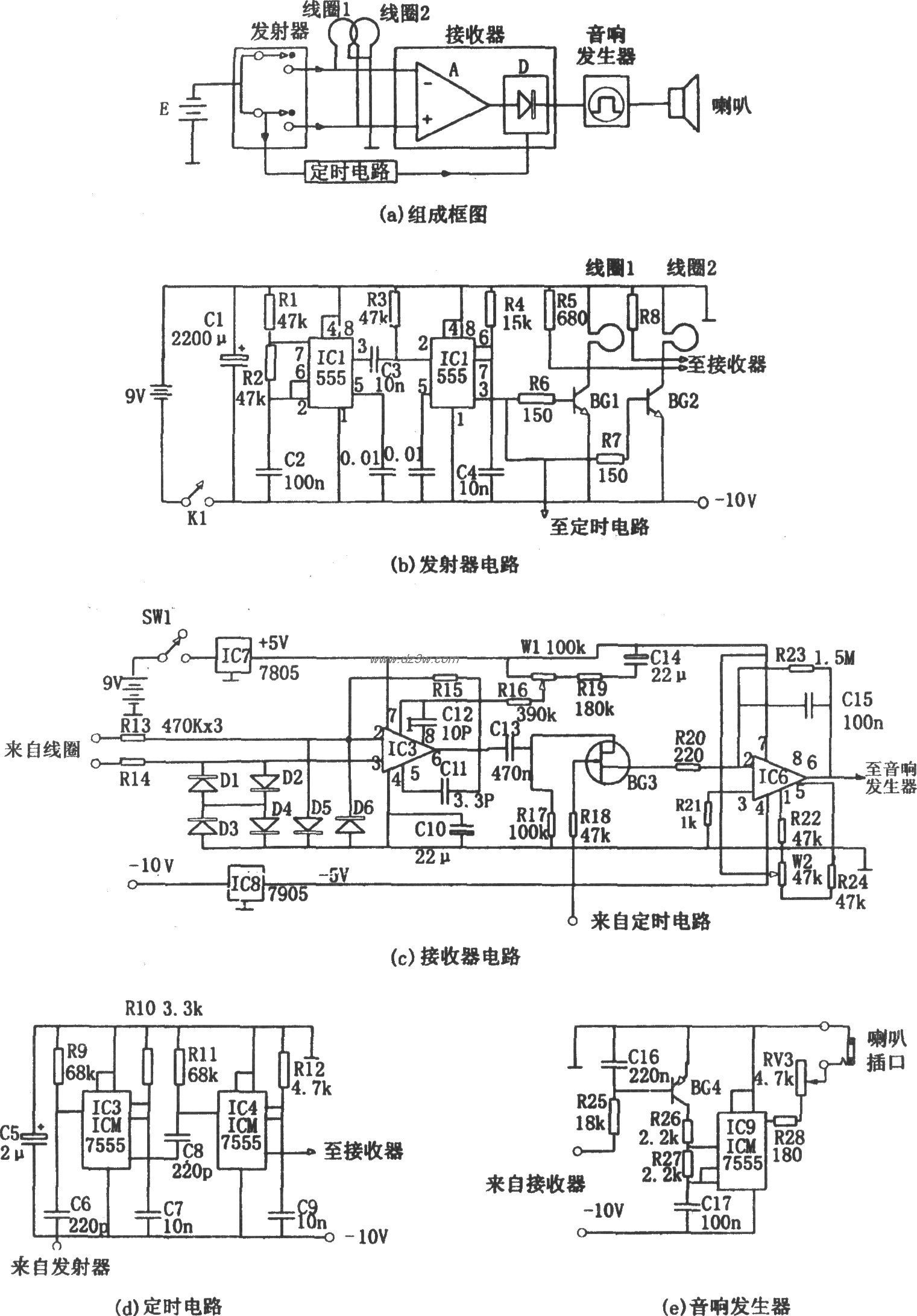
無線金屬檢測器機器人電路圖:
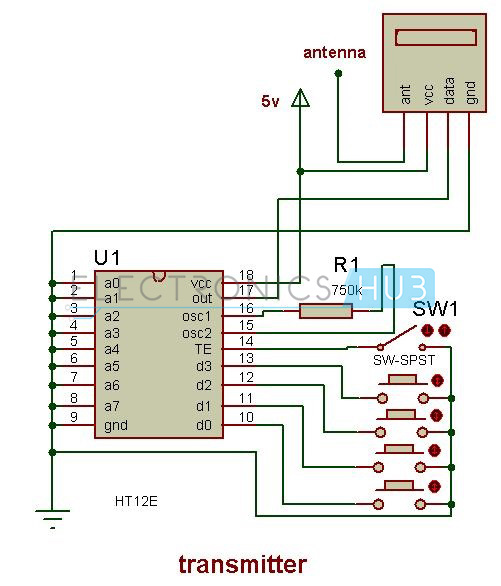
發(fā)射器電路:
接收器電路:

電路元件:
硬件組件:
AT89c51微控制器。
射頻編碼器和解碼器
射頻發(fā)射器和接收器一對。
按鈕。
蜂鳴器。
機器人。
L293d
Rs 232電纜。
軟件組件:
Keil software
Flash magic
Proteus
使用單片機的金屬探測機器人的電路設(shè)計:
金屬探測機器人項目可以分為幾個部分:1)發(fā)射器部分,2)接收器部分。
發(fā)射器部分由射頻編碼器、射頻發(fā)射器和按鈕組成。這里使用的射頻編碼器IC是HT12E,它是一個18針的IC,4位二進制輸入通過AD0、AD1、AD2、AD3引腳應(yīng)用到解碼器上。A0-A7是用于安全傳輸?shù)牡刂芬_。這些引腳在發(fā)射器電路中被連接到地。4位數(shù)據(jù)被平行地傳送到射頻發(fā)射器。串行地傳送到射頻接收器。輸入是通過按鈕給編碼器的。射頻對的工作頻率為434kHz。
接收器部分由AT89c51微控制器、射頻解碼器、射頻接收器、金屬探測器、蜂鳴器、L293d集成電路和機器人組成。
收到的數(shù)據(jù)被應(yīng)用于射頻解碼器。這里使用的射頻解碼器是HT12D。解碼后的輸入被連接到微控制器的2號端口。四個數(shù)據(jù)引腳D0-D3連接到端口P2.0-P2.3,解碼后的數(shù)據(jù)被應(yīng)用到控制機器人運動的微控制器。蜂鳴器連接到端口3.4,當(dāng)在其路徑上檢測到任何金屬時,蜂鳴器就會響。
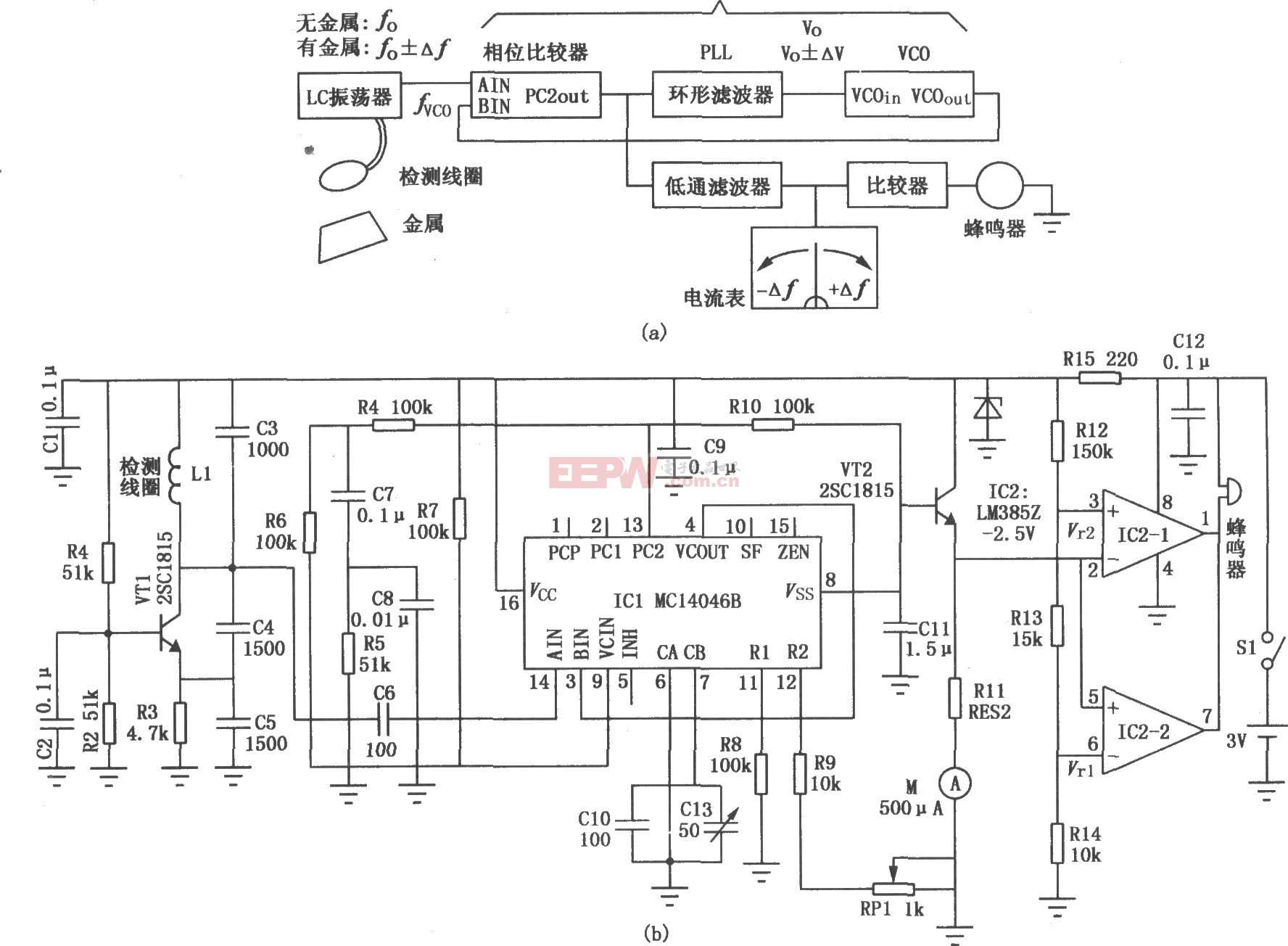
金屬探測器被連接到微控制器的3.2腳。在這里,金屬探測器的位置連接了一個按鈕。金屬探測器在電路中起主要作用。這里面將有一個振蕩器,它產(chǎn)生的交流電通過線圈產(chǎn)生一個交變磁場。當(dāng)任何金屬出現(xiàn)在線圈附近時,會產(chǎn)生磁場,因此可以通過使用另一個線圈來檢測磁場的變化。
L293d是一個電機驅(qū)動IC。該IC用于驅(qū)動電機。L293d內(nèi)部有h橋。要了解更多關(guān)于這個IC的信息,請參考L293d的數(shù)據(jù)表。
無線金屬探測機器人電路工作:
首先用flash magic將代碼燒入微控制器。
現(xiàn)在打開電路的電源。
現(xiàn)在用發(fā)射器發(fā)送命令'1'。
這將被傳送到接收器。
在接收端,接收器接收這些命令并根據(jù)命令移動機器人。
下面的命令使機器人在指定的方向移動
前進
向后
左轉(zhuǎn)
向右
在機器人移動的過程中,如果在其路徑上檢測到任何金屬,機器人就會停在那里,并發(fā)出蜂鳴器。
當(dāng)發(fā)射器發(fā)出指令時,它又開始移動。
金屬探測器機器人電路算法:
最初,聲明端口2為輸入,因為它與解碼的輸入相連。
現(xiàn)在聲明端口1為輸出,因為機器人的電機引腳連接到端口1上。
啟用外部中斷。
現(xiàn)在檢查端口2的輸入。
如果接收到的值等于1,那么將端口值設(shè)為0x01,使機器人向前進方向移動。
當(dāng)中斷發(fā)生時,使電機的輸出引腳為低電平。這寫在ISR中。
基于單片機的金屬探測機器人應(yīng)用:
這些機器人被用于探測地雷。
機器人用于檢測地面上的礦物。
這些機器人用于檢測炸彈。
這些機器人可用于建筑業(yè),定位混凝土中的鋼筋。
它們被用于機場和建筑安全,以檢測武器。
該電路的局限性:
發(fā)射器只能在大約30米的射頻范圍內(nèi)操作機器人。

評論