LED行車燈電路

在這篇文章中,我們將看到不同的LED跑馬燈電路,這也被稱為LED騎士電路。這些電路可用于汽車、摩托車、自行車等,因為它們會給觀眾帶來吸引人的視覺效果。
本文引用地址:http://www.104case.com/article/202305/447073.htm我們使用非常簡單的元件創(chuàng)建了4個不同的LED運行燈電路。在第一個電路中,我們在基于晶體管的可控多晶振蕩器的幫助下實現(xiàn)了一個閃爍的LED。
第二個電路是基于IC CD4017的,其中我們有追逐式LED。在這個電路中,LEDs只是以一種順序的方式一個接一個地打開。第三個電路也是用CD4017實現(xiàn)的。在這個電路中,LEDs將以不同的模式發(fā)光,即雙向運行的LEDs。
在最后一個電路中,LED最初以單程方式運行,然后以反向方式運行。這意味著,當它來回走動時,其模式與鐘擺相同。
這個電路可以用來美化汽車,也可以在汽車拋錨需要幫助的危機時刻發(fā)揮作用。
我們將在下面的章節(jié)中看到這些電路的細節(jié),如電路圖、所需部件和工作情況。
簡單的LED行車燈電路(閃爍的LED)
在這個項目中,我們設計了一個簡單的LED閃光燈電路。我們使用了兩組LED(一側(cè)3個,另一側(cè)3個),它們將被交替打開,所以結(jié)果是一個明亮的閃爍的LEDs。




電路圖

所需元件
2個2N2222A (NPN晶體管)
2個22μF - 50V電容器(極化)。
2 x 46 KΩ 電阻器 (1/4瓦)
6個8毫米亮白LED
12V電源
連接線
面包板
項目的工作
從電路圖中可以看出,該項目是基于簡單的Astable或自由運行的多頻振蕩器。當打開電路時,一個晶體管將被打開(處于飽和狀態(tài)),另一個將被關閉(截止)。
假設Q1處于開啟狀態(tài),Q2處于關閉狀態(tài),電容C2將通過串聯(lián)LED充電。由于LED被連接在電流的路徑上,它們將被點亮。
在這段時間內(nèi),由于電容C1的放電,晶體管Q2是關閉的(因為負極板與Q2的基極相連)。在時間常數(shù)C1R1之后,電容C1完全放電并開始通過R1充電。
充電方向是相反的。隨著電容器的充電,它建立了足夠的電壓(0.7V),使晶體管Q2導通。這時,電容器C2開始通過Q2放電。
由于連接到晶體管Q1基極的電容器C2的板變成了負值,晶體管Q1被關閉,這組LED被關閉。
現(xiàn)在,電容器C1開始從相應的串聯(lián)LED(通過Q2的基極)充電。由于這組LED連接在電流路徑上,它們將被打開。
現(xiàn)在,電容器C2放電,完全放電后,它將通過R2開始充電。隨著電容C2中電荷的增加,當電壓達到0.7V時,它將使晶體管Q1導通。從這一點上看,這個過程與前面一樣重復。
使用CD4017和555的LED追逐器電路
LED騎士系列的第二個項目是一個使用CD4017十進制計數(shù)器和555定時器IC的LED追逐器電路。我們將看到這個項目的電路圖、使用的元件和工作情況。
電路圖

所需元件
1 x CD4017十進制計數(shù)器IC
1 x 555定時器IC
1 x 18 KΩ 電阻器 (1/4瓦)
1 x 2.2 KΩ 電阻器 (1/4瓦)
1 x 100 KΩ 電位器
1 x 1 μF - 50V 電容(極化)。
1 x 0.1 nF 陶瓷盤電容(100 pF 代碼 101)
10 x 8mm亮白LED
連接線
5V電源
面包板
項目的工作
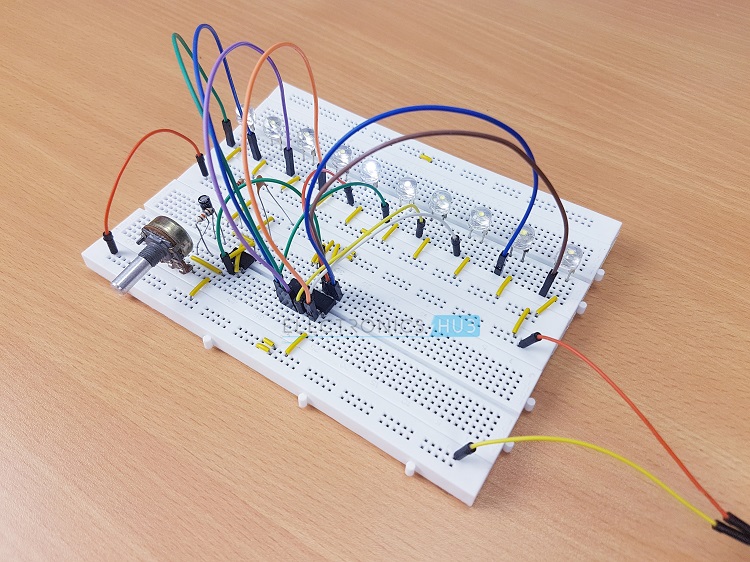
在這個項目中,我們設計了一個簡單的LED追逐器電路,其中的LED一個接一個地打開,給我們帶來了一個LED追逐另一個的效果。現(xiàn)在我們來看看這個項目的工作情況。
我們在電路圖中注意到的第一件事是,電路中有兩個部分:555定時器部分和帶LED的CD4017十進制計數(shù)器IC部分。在這個項目中,555定時器IC被配置為一個可控硅多諧振蕩器。
在這種模式下,它產(chǎn)生一個脈沖,其頻率由元件R1(2.2KΩ)、R2(18KΩ)、VR1(100KΩ)和C1(1μF)決定。脈沖的頻率可以通過調(diào)整100KΩ的POT來控制。
這個脈沖被送給CD4017十進制計數(shù)器IC作為其時鐘輸入。通過了解CD4017的工作原理,它在時鐘輸入引腳上每收到一個時鐘脈沖,計數(shù)就會增加1,因此每個輸出引腳在每個相應的時鐘脈沖下都會變成高電平。
由于它是一個十年計數(shù)器,我們將得到一個10的計數(shù),由于我們將明亮的白色LED連接到輸出引腳,當相應的引腳變成高電平時,每個LED將被打開。
在10個時鐘脈沖之后,計數(shù)被重置并將從頭開始。如果將LED以環(huán)形方式放置,我們就會得到一種追趕LED的感覺和外觀。
帶有11個LED的雙向運行LED,CD4017和555定時器IC
這是另一個運行中的LED電路,但與之前的運行中的LED電路不同的是,在之前的電路中,它被設計成一個單程運行的LED電路,而在這個電路中,LED將以兩種方式運行。
電路圖

所需元件
1 x CD4017 十進制計數(shù)器集成電路
1 x 555定時器IC
1 x 18 KΩ 電阻器 (1/4瓦)
1 x 2.2 KΩ 電阻器(1/4瓦)
1 x 470 Ω 電阻器 (1/4 瓦)
1 x 100 KΩ 電位器
1 x 1 μF - 50V 電容器(極化)
1 x 0.1 nF 陶瓷盤電容 (100 pF 代碼 101)
8個1N4007 PN結(jié)點二極管
11個8毫米亮白LED
連接線
12V電源
面包板
項目的工作
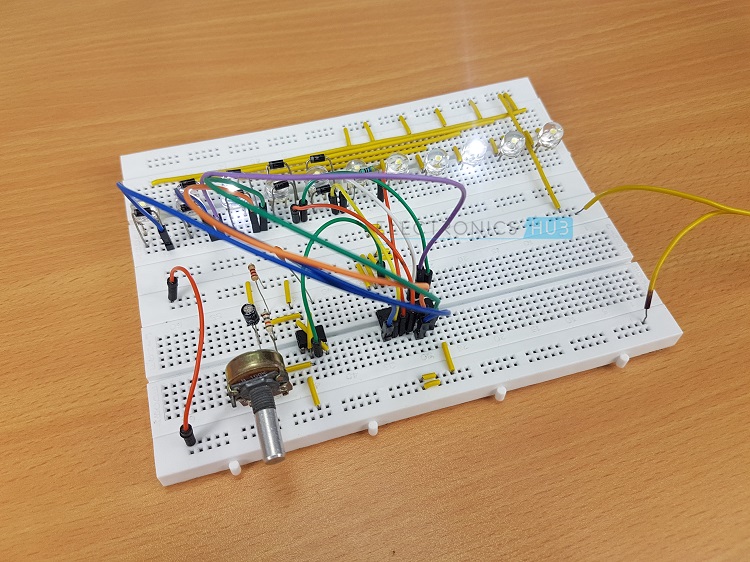
雙向運行的LED項目的工作與LED追逐者電路類似,只是LED的方向不同。 我們現(xiàn)在來看看這個項目的工作情況。
555定時器部分(其操作與上述電路中解釋的類似)產(chǎn)生一個脈沖信號,作為時鐘輸入給CD4017計數(shù)器。與CD4017的Q0相連的LED6將首先亮起。
與CD4017的Q1相連的LED5和LED7將接著點亮。連接方式如電路圖所示,這個過程一直持續(xù)到Q5,它與LED1和LED11相連。直到這一步,LED的單程照明將被完成。
為了實現(xiàn)LED的雙向點亮,Q6被連接到LED2和LED10,Q7被連接到LED3和LED9,以此類推。
最后的效果將是一個雙向運行的LED,其順序如下: LED6(Q0),LED5-LED7(Q1),LED4-LED8(Q2),LED3-LED9(Q3),LED2-LED10(Q4),LED1-LED11(Q5)為一路,隨后是LED2-LED10(Q6),LED3-LED9(Q7),LED4-LED8(Q8),LED5-LED7(Q9)。
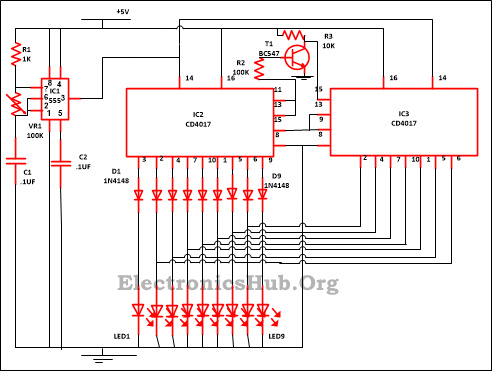
LED騎士電路圖電路圖:
該電路所需的元件:
集成電路
NE555 - 1
CD4017 - 2
電阻器
R1 (1K) - 1
R2 (100K) - 1
R3 (10K) - 1
VR1 (100K) - 1
C2, C1 (.1uf) - 2
D1-D9 (1N4148) - 9
晶體管(BC547) - 1
LED1-LED9 - 9
說明:
為了熟悉電路的工作布局,熟悉各個引腳是很重要的。
這個集成電路有16個引腳,其中3個是輸入引腳,10個是輸出引腳,一個是接地引腳,一個是電源引腳,剩下的一個是輸出引腳。如下所示,IC CD4017的引腳圖。
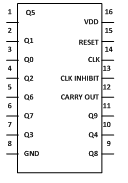
IC CD4017引腳圖1. 輸入引腳:
復位針腳(針腳15)--計數(shù)器通過這個針腳復位到零。假設你希望計數(shù)器從第三個引腳開始計數(shù),那么你需要將第四個輸出端與15引腳相連。因此,在每一個第三次輸出后,計數(shù)會自動從零開始。
時鐘引腳(14號引腳)--每次IC的14號引腳移動到高電平時,都會提供輸出。就像時鐘的初始脈沖,3號針腳會給你輸出,同樣,下一個時鐘脈沖到達時,2號針腳也會提供輸出,以此類推。在10個時鐘脈沖之后,它將再次從Q0輸出開始。
時鐘抑制引腳(引腳13)--該引腳用于將計數(shù)器的狀態(tài)從ON變?yōu)镺FF,反之亦然。如果你想關閉計數(shù)器,針腳13應該達到最高狀態(tài)。如果它處于高電平狀態(tài),那么它就不會關注時鐘脈沖,不管你按了多少次開關,都意味著計數(shù)不會向前。在我們的電路中,第13針是接地的。
2. 輸出引腳(引腳Q0-Q9)-以順序的方式從這些引腳接收輸出。比如3號針腳會給你第一個脈沖的輸出,以此類推。
3. 接地引腳(8號引腳)和電源引腳(16號引腳)--對于集成電路的工作,8號引腳提供接地,而電源則由16號引腳提供。
4. 4. 輸出引腳(12號引腳) - 在這個引腳的幫助下,可以連接一個或多個CD4017集成電路。假設你想再連接一個CD4017,那么就把12號引腳與它的后代的輸入時鐘相連。一級CD4017的載波引腳與第二個時鐘輸入端相連接,同樣,第二個載波引腳與第三個時鐘輸入端相連接,以此類推。你可以在電路圖中看到這一點。
NE555和CD4017是兩個集成電路,該電路是基于這兩個集成電路和其他一些組件。在這個電路中,集成電路555定時器被用來作為一個星形振蕩器。
IC CD4017被用作一個CMOS計數(shù)器/驅(qū)動器。每次當它得到時鐘脈沖時,它通過時鐘輸入獲取時鐘脈沖,所有的10個輸出依次打開。這是眾所周知的IC,它在其他各種項目中非常有用,如追光器、矩陣模。
在這個電路中,集成電路NE555被用作一個星形模式,用于為電路產(chǎn)生一個時鐘脈沖。這被用來給IC1的第3腳提供一個振蕩波,該腳是用來輸出的。
通過VR1的幫助,可以改變振蕩的速度。555定時器的振蕩頻率可以通過以下方式計算
f=1. 44/(R1+2* (VR1) *C1)
在這個電路中,由于我們采用了兩個十進制計數(shù)器,所以計數(shù)將從0開始到16。電路中的IC2完成了0到9的計數(shù),而在二極管的幫助下,其余的計數(shù)將由IC3完成。
在555定時器獲得電源的情況下,IC1的第3腳輸出到CD4017的第14腳,這又為IC2工作提供了時鐘脈沖。CD4017在得到時鐘輸入后從零開始計算(因為它有內(nèi)置的計數(shù)器)。
在14號引腳移動到高電平后,它被逐一轉(zhuǎn)發(fā)到每個引腳。就像初級階段的輸出Q0將在3號引腳接收,LED1將閃爍,LED2將從4號引腳發(fā)亮,以此類推。
當計數(shù)器到達11號引腳即第九輸出端時,它將產(chǎn)生一個臨時的高電平,這個高電平被耦合到13號引腳(時鐘抑制)。如果14號引腳處于高電平,時鐘脈沖將被忽略,IC2的計數(shù)停止。
而作為回報,IC3的15號引腳變成低電平,因為先前的晶體管BC547是高電平狀態(tài)。由于這個低信號,IC3的15號針腳在短時間內(nèi)被重置為低電平,IC3的輸出從Q0(針腳3)開始統(tǒng)計,并逐個向前移動。
當它到達Q8的時候,也就是第9腳再次與IC3的第13腳相連,因為無論輸入信號如何,IC3都會停止計數(shù)。如果引腳13處于高電平,則引腳14不理會時鐘脈沖,這意味著IC3停止計數(shù)。
這將再次給IC2的15腳復位,現(xiàn)在由IC2開始計數(shù),IC3的計數(shù)被禁止。
這也意味著,當IC2的輸出計數(shù)完成后,IC3的計數(shù)也會停止,同樣IC2也會在IC3的計數(shù)時停止。因此,從IC3接近的輸出信號以相反的方向傳送到IC2。







評論