智能防抖叉勺的設計

智能防抖勺的主要面向帕金森患者,帕金森患者手腳麻木,四肢顫抖,手部變得不可自我控制。在我們正常人眼里十分容易的進餐,在他們面前卻變得無比的困難。有因為手部的顫抖,食物經常因為抖動而從餐勺里灑出,而且隨著年齡的增長患有帕金森的人數也是呈現幾何倍數的增長,對于老人來說,不想給子女增添麻煩,同時對于自己來說不能獨立進食也是一種自信心的打擊[1]。于是我們的產品設計就是為了能夠妥善的處理這個問題。我們設計的產品采用智能高速伺服控制系統,提供高精確的主動防抖功能,基于無人機姿態解算技術,帶來更加穩定的控制效果,自動區別有意識和無意識的抖動,在進餐時可以有效地抵消手部震顫,但不對手就行任何的處理。在材料上我們選取醫用萃特外殼不含雙酚A,且耐高溫;醫用超薄硅膠,具有優異的抗沖擊強度,抗氧化水解能力,滿足一切安全無害需求。同時我們采取了全自動感應裝置拿起叉勺開啟,放下時休眠,極大的延長了待機時間。
本文引用地址:http://www.104case.com/article/202205/434318.htm1 防抖技術的現狀
防抖技術起初用于攝影方面,現在在手機攝像上廣泛應用。手機影像防抖經過三個階段的發展,EIS(電子影像穩定,electric image stabilization)、OIS(光學影像穩定,optical image stabilization)、AIS( 智能影響穩定,AI image stabilization )。電子防抖在視頻領域較為常見,即拍攝者由于自身的重心變化,導致拍攝的視頻畫面頻繁跳動,使拍攝畫質大幅度降低。EIS 技術通過無人機姿態技術,對視頻畫面進行自動化處理裁切無效部分,從而使視頻畫面變得清晰。OIS 是應用螺旋儀的原理獲得的姿態變換,相較于EIS 的裁切畫面,OIS取用控制鏡片或者鏡片組的細微移動來進行補償[2]。隨著AI 技術的發展,漸漸地也融入到防抖方面,AI 算法融合了EIS 和OIS 的優點,對相機的相對運動進行了一定性的預算,進而得到了更加平穩和準確的相機姿態,視頻的畫質得到了大幅度的提升,新的防抖措施帶來了更好的用戶體驗,如圖1 所示。

圖1 光學防抖
無論是依賴云臺的的外部防抖,還是手機自身的光學防抖都采取了方向抵消的方法,這也為我們的防抖叉勺提供了思路,如圖2所示。目前我國的防抖叉勺器械基本處于空白狀態,我們采取線性控制算法主動抵消手部的抖動。

圖2 AI成圖
2 智能防抖叉勺的模型的建立
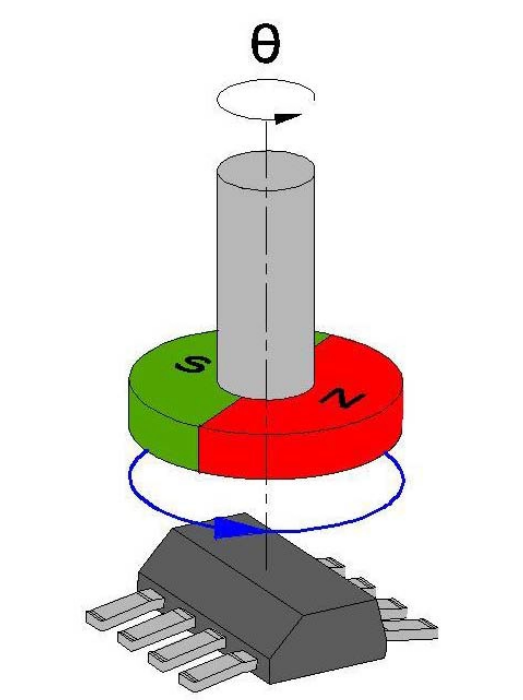
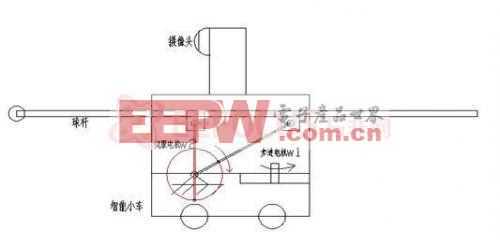
防抖叉勺采取勺柄分離設計,中間使用磁力連接,叉勺配合更加易于完成進餐。我們的智能防抖叉勺相似于關節機械臂,我們需要限制其自由度,由于其結構特征,我們不需要限制X、Y、Z 方向的移動,我們使用微型電機控制勺頭在Y 方向的轉動,垂直方向控制Z軸的轉動X 軸的不需要限制,建模如圖3 所示。

圖3 防抖勺空間坐標系
防抖叉勺屬于一個動態平衡系統,使手部抖動與叉勺給予的反抖動形成一個相對抵消的狀態下,與無人機姿態模式相通,利用傳感系統進行反向補償。根據牛頓第一定律可知,當物體處于受力平衡的狀態下,其處于靜止或者勻速直線運動。當叉勺處于相對平衡的狀態,帕金森患者的進餐問題就得以解決。
3 防抖控制算法的分析
傳統控制算法將傳遞函數的微分方程進行拉氏變換,將微積分替換成s;而狀態方程就變成了微積分方程,每個狀態方程都包含一個一階微分方程,逐項相加,從而能表示多階微分及多變量系統。通過輸入量的改變引起結果的改變。通俗來說,感應器將我們的手抖浮動頻率輸入,云端通過拉氏變換得到反都得頻率進行反向平衡。

圖4 防抖控制系統
現代控制理論思路利用狀態方程進行穩定分析線性系統的狀態方程:

當系統達到平衡點時,即導數為0 的狀態,該點為平衡點。達到平衡點時叉勺處于平衡狀態,通過輸入調整方程的特征值來到達調整系統的效果,調節系統的平衡點來規范系統至理想狀態。
伺服系統可以根據物體的位置、狀態、方位等輸出被控量能夠跟隨輸入信號進行自動的任意的變化的控制系統。伺服電機本身具有發射脈沖的功能,伺服電機每旋轉一次角度都會產生相應的脈沖,和伺服電機接受的脈沖相互呼應,從而實現精確的定位與反饋。伺服系統可以根據傳感系統進行相應的變化,從而平衡叉勺在Y軸與Z 軸的轉動,限制其自由度。同時采用雙閉環直流調速系統,其具備動態響應迅速、抗干擾能力強的優勢。眾所周知閉環系統擁有良好的抗干擾性能,對反饋環的前向通道的干擾動作有一定性的削弱,保證了系統的穩定性。利用轉速負反饋和PI 調節器的閉環能夠在確保系統穩定性的前提下,實現無差別的變數。這在防抖的措施上可以說是一項十分契合的。在帕金森患者進行手部不自覺抖動的情況下,雙閉環的抗干擾與伺服電機的配合,來實現我們叉勺的有效防抖,幫助患者完成獨立的進餐。

圖5 閉環雙環控制
4 模糊控制原理
模糊控制就是將數學與自動化控制融合在一起的一種現代控制技術,相較于傳統的算法,不依靠精確的數學算法的推導,應用模糊變量進行模糊集合,用以模糊推理[3]。利用模糊化,確認各個輸入量領域模糊子集和隸屬函數,假設我們手部抖動頻率在2 赫茲,屬于低抖動頻率。我們的模糊化技術為了確定什么是低抖動頻率,接下來我們需要確定我們的抖動變量范圍的規定變量范圍[4]。進而給發送輸出頻率給后續進行方向抖動平衡。
5 材料分析
在材料選擇方面,我們考慮了PC、ABS、TRITAN、PPSU、SILICA 等。
PC:具有優異性能的無定形熱塑性樹脂材料。它擁有良好的延展性和耐熱性與尺寸穩定性,并且無毒無害可著色的材質特點。雖然硬度與金屬類相比略差,但是也能夠滿足我們在日常生活的使用。在我們的日常生活中,酸堿鹽油必不可少,此材料耐腐蝕性不佳。
ABS:擁有良好的耐酸堿的化學腐蝕性能,加工成型較為簡單,力學與熱學性能都是極佳,而且具有較長的使用壽命,但是ABS 材料耐候性差容易受到陽光的作用使自身變色變脆。
PPSU:一種無定形的熱性塑料,具備高度的高水解穩定性,制作產品可以承受多次的蒸餾消毒,但是PPSU 在劃傷后析出雙酚A, 雙酚A 對人體有一定性的危害,所以不予采用。
TRITAN:它的材料性質具備PC 與沖擊耐用性相近,同時具備PPUS 的優點,最大的優勢就是安全性,它不產生任何的雙酚A 和雙酚S。雖然其耐溫最高在96 攝氏度,但是完全滿足我們在日常生活中的要求,是我們設計材料的最優選。
SILICA:高活性的吸附性材料,除了強堿、氫氟酸外不與其他的任何物質發生反應,并且不溶于水和其他的溶劑,無毒無害。可以用于輔助材料的構成,為產品提供了保障。
6 總結
帕金森是社會中常見的運動障礙病例,并且人數伴隨著社會的發展不斷地上升,且大部分為老年人。患病不僅給老人本身帶來了極大的不變,還給家人和社會帶來經濟負擔和人力負擔。本文主要對智能防抖叉勺的基本技術進行了淺顯的分析,對智能防抖叉勺的物理模型進行建立,從產品的角度進行合理的假設和適當的簡化,明確了產品設計與制造的關鍵點,提出雙閉環控制原理。內環為控制位置讓系統的跟蹤誤差減少,加快相應速度。外環為防抖控制,是我們產品的核心,闡述了控制原理為保持在手部抖動的情況下保證勺面與食物的相對靜止,維持勺頭能夠處于中心位置,達到進食輔助的作用。產品的試驗機上我們使用雙閉環的控制算法。軟件運用前后控制的構想,前臺進行防抖,后臺進行控制。經過實驗測試可有效減少百分之七十的抖動。
參考文獻:
[1]王雪梅,曹振湯,柳竹等.特發性震顫與特發性震顫發展成帕金森患者病患者的臨床比較[J].中國康復理論與實踐.2018,24(07):757-762.
[2]岑裕庭.相機防抖淺析.輕功科技[J].2016,32(06):77-78.
[3]王日俊;百越;續志軍等.基于擾動感測觀測器的多旋翼無人機機載云臺模糊自適應跟蹤控制[J].浙江大學學報.2015,49(10):2005-2012.
[4]彭勇剛.模糊控制工程應用若干問題研究[D].杭州:浙江大學,2012.
(本文來源于《電子產品世界》雜志2022年5月期)




評論