關于機器人外部自動運行模式的過程和配置解析

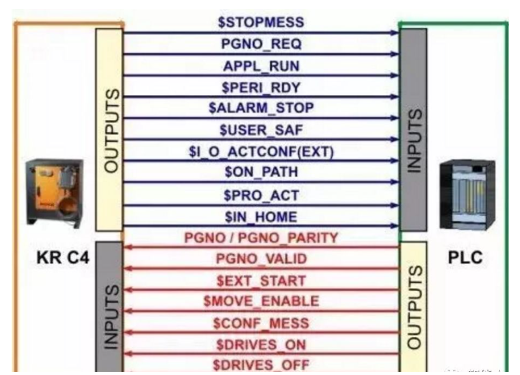
1.通過外部自動運行接口可用上級控制器(例如用一個PLC)來控制機器人進程。
本文引用地址:http://www.104case.com/article/202105/425329.htm2.上級控制系統通過外部自動運行接口向機器人控制系統發出機器人進程的相關信號 (如運行許可、故障確認、程序啟動等)。機器人控制系統向上級控制系統發送有關運行狀態和故障狀態的信息。
輸入端 (從機器人控制器的角度)PGNO_TYPE - 程序號類型此變量確定了以何種格式來讀取上級控制系統傳送的程序編號。
如下表進行說明:
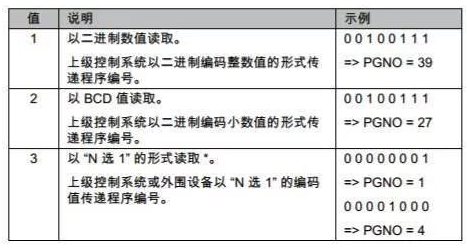
備注:采用這種傳遞格式時,未對 PGNO_REQ、PGNO_PARITY 以及
PGNO_VALID 的值進行分析,因此無意義。
PGNO_LENGTH - 程序號長度此變量確定了上級控制系統傳送的程序編號的位寬。值域:1 … 16。若 PGNO_TYPE 的值為 2,則只允許位寬為 4、8、12 和 16。PGNO_PARITY - 程序號的奇偶位上級控制系統傳遞奇偶位的輸入端。

如果 PGNO_TYPE 值為 3,則 PGNO_PARITY 不被分析。PGNO_VALID - 程序號有效上級控制系統傳送讀取程序號指令的輸入端。
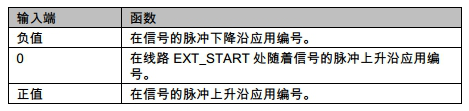
$EXT_START - 外部啟動設定了該輸入端后,輸入 / 輸出接口激活時將啟動或繼續一個程序 (一般為 CELL.SRC)。備注:僅分析信號的脈沖上升沿。在外部自動運行中無 BCO 運行。這表明,機器人在啟動之后以編程設定的速度 (沒有減速)到達第一個編程設定的位置,并且不停在那里。
$MOVE_ENABLE - 允許運行該輸入端用于由上級控制器對機器人驅動器進行檢查。

備注:當驅動裝置由上級控制器停住后,將顯示 “ 開通全部運行 ” 的信息提示。刪除了該信息提示并且重新發出外部啟動信號后機器人才能重新運動。投入運行時變量 $MOVE_ENABLE 常常設計為值 $IN[1025]。如果此后忘記設計另一個輸入端,則不能外部啟動。
$CONF_MESS - 確認信息提示通過給該輸入端賦值,當故障原因排除后,上級控制器將自己確認故障信息。備注:僅分析信號的脈沖上升沿。
$DRIVES_ON - 驅動裝置接通如果在此輸入端上施加了持續至少20毫秒的高脈沖,則上級控制系統會接通機器人驅動裝置。
$DRIVES_OFF - 驅動裝置關閉如果在此輸入端上施加了持續至少20毫秒的低脈沖,則上級控制系統會關斷機器人驅動裝置。輸出端 (從機器人控制器的角度)
$ALARM_STOP - 緊急停止該輸出端將在出現以下緊急停止情形時復位:1.按下了庫卡控制面板 (KCP)上的緊急停止按鍵。(內部緊急關斷)2.外部緊急停止注意:出現緊急停止時可從輸出端 $ALARM_STOP 和 Int. NotAus 的狀態看出是哪種緊急停止:兩個輸出端均為 FALSE:觸發了庫卡控制面板 (KCP)上的緊急停止按鍵
$ALARM_STOP FALSE,Int. NotAus TRUE:外部緊急停止$USER_SAF - 操作人員防護裝置 / 防護門該輸出端在打開護欄詢問開關 (運行方式 AUT)或放開確認開關 (運行方式 T1 或 T2)時復位。
$PERI_RDY - 驅動裝置處于待機狀態通過設定此輸出端機器人控制系統通知上級控制系統機器人驅動裝置已接通。
$STOPMESS - 停止信息該輸出端由機器人控制系統來設定,以向上級控制器顯示出現了一條要求停住機器人的信息提示。(例如:緊急停止按鍵、運行開通或操作人員防護裝置)確認信息提示前提條件 $STOPMESS - 有停止信息確認信息提示 $CONF_MESS - 確認信息提示可確認的信息提示就此刪除 $STOPMESS - 不再有停止信息,現在可撤回 $CONF_MESS。
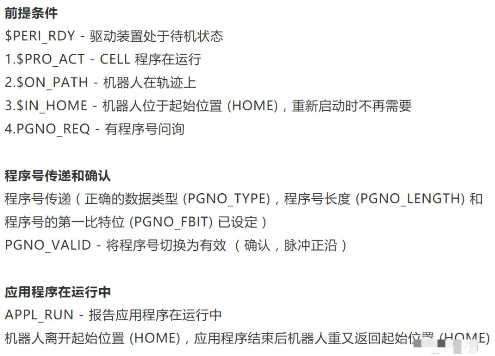
前提條件1)$PERI_RDY - 驅動裝置處于待機狀態2)$IN_HOME - 機器人位于起始位置(HOME)3)無 $STOPMESS - 無停止信息
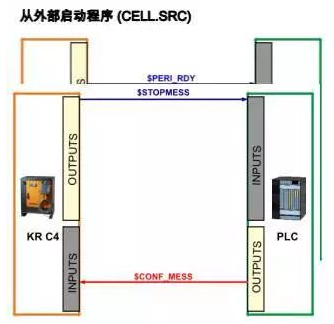
外部啟動$EXT_START - 接通外部啟動 (脈沖正沿)CELL 程序在運行1.$PRO_ACT - 報告 CELL 程序在運行2.$ON_PATH - 一有機器人位于軌跡上的反饋,信號 $EXT_START 便撤回。處理程序傳遞和應用程序
操作步驟1. 在主菜單中選擇配置 》 輸入 / 輸出端 》 外部自動運行。2. 在數值欄中標定所需編輯的單元格,然后點擊編輯。3. 輸入所需數值,并用 OK 加以保存。4. 對所有待編輯的數值重復第 2 和第 3 步。5. 關閉窗口。改動即被應用。











評論