基于使用Atmega328P和ULN2003步進(jìn)驅(qū)動(dòng)器制造繪圖儀機(jī)器人

在該項(xiàng)目中,將制造帶有mXY板的XY繪圖儀機(jī)器人。借助該機(jī)器人,可以墻壁,面板或A4紙上繪制圖像,還可以打印圖片或打印文本。該機(jī)器是一種簡(jiǎn)單的設(shè)備,它可以使用普通的筆、電動(dòng)機(jī)和繩子來畫畫。
本文引用地址:http://www.104case.com/article/202104/425110.htm該開發(fā)板使用Atmega328P和ULN2003步進(jìn)驅(qū)動(dòng)器。所以可以使用單個(gè)板進(jìn)行該項(xiàng)目。5V 、1A適配器或移動(dòng)電源足以滿足該項(xiàng)目的功耗要求。當(dāng)兩個(gè)電動(dòng)機(jī)都運(yùn)行時(shí),觀察到最大電流為0.4A。
所需組件:
1個(gè)帶Bootloader的ATmega328P-PU
2個(gè)ULN2003 DIP16
2個(gè)28YBJ-48 5V 5線步進(jìn)電機(jī)
1個(gè)CH340G SOP16
B型USB插座
DIP插座28/16引腳
12/16 MHz晶振
L7805 TO-220
10uF電容器
22pF / 0.1uF / 10nF陶瓷電容
LED
電阻10K / 1K
電源插座
2針端子塊
2個(gè)JST B5B-XH連接器
1個(gè)MG90S伺服電機(jī)
GT2皮帶輪16齒套裝
GT2橡膠腰帶(5M)
3合1跳線
連接圖:
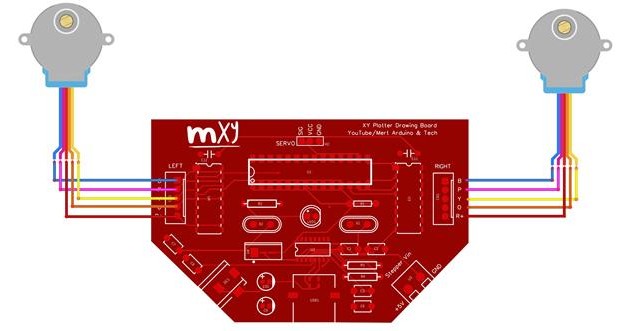
(步進(jìn)電機(jī)和伺服器都需要一根5M的延長(zhǎng)電纜線)
機(jī)器尺寸圖:
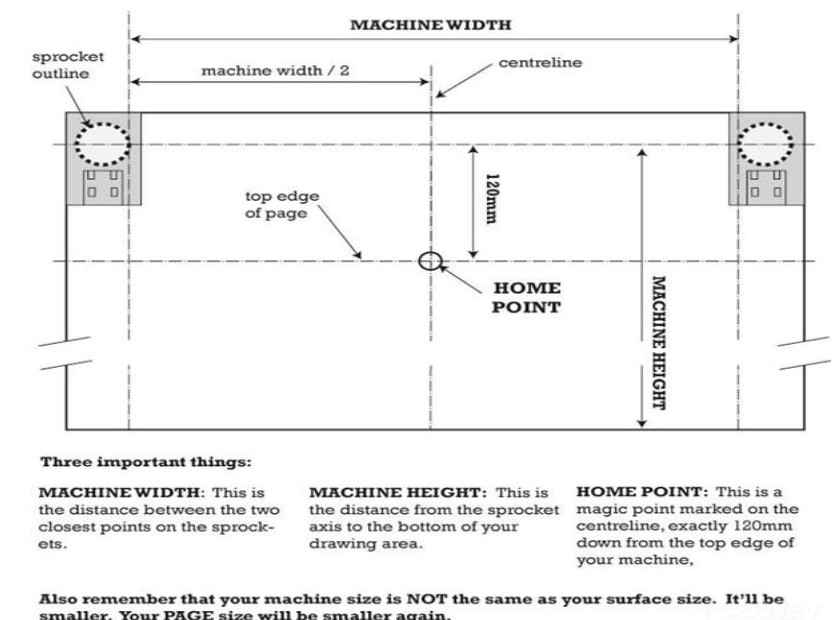
(機(jī)器尺寸與表面尺寸不同)
機(jī)器寬度:這是鏈輪上兩個(gè)最接近點(diǎn)之間的距離(兩個(gè)皮帶輪之間),在機(jī)器寬度上調(diào)節(jié)兩個(gè)皮帶輪之間的尺寸。
機(jī)器高度:這是從鏈輪軸線到圖形(面板)區(qū)域底部的距離,調(diào)整機(jī)器高度(滑輪和面板末端之間的高度)。
吊船和托架:
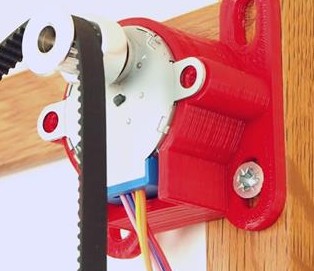
可以在ZIP文件“ Gondola_Bracket_Models”中找到吊船和步進(jìn)電機(jī)安裝支架3D模型:
https://github.com/MertArduino/mXY-board-xy-plotter-drawing-machine
源代碼:
一、它在Arduino IDE v1.8.5 和 Processing v2.2.1中運(yùn)行良好
下載并安裝Arduino IDE v.1.8.5 https://www.arduino.cc/en/Main/OldSoftwareReleases#previous
下載并安裝Processing v2.2.1
https://processing.org/download/?processing
下載mXY-Plotter-Drawing-Machine
https://github.com/MertArduino/mXY-board-xy-plotter-drawing-machine/archive/master.zip
二、Arduino源代碼
轉(zhuǎn)到mXY-Plotter-Drawing-Machine arduino-source-code-libraries libraries文件夾。
將arduino-source-code-libraries libraries的內(nèi)容復(fù)制到C: Users YourPCname Documents Arduino libraries文件夾中。
轉(zhuǎn)到mXY-Plotter-Drawing-Machine arduino-source-code-libraries文件夾。
復(fù)制polargraph_server_a1文件夾并將其粘貼到C: Users YourPCname Documents Arduino文件夾中。
“ polargraph_server_a1.ino”文件是ULN2003驅(qū)動(dòng)程序和28YBJ-48步進(jìn)電機(jī)的編輯副本。您可以在這里獲取原始版本 (https://github.com/euphy/polargraphcontroller/releases/tag/2017-11-01-20-30)
打開Arduino IDE
轉(zhuǎn)到文件-》寫生簿-》 polargraph_server_a1-》打開polargraph_server_a1源代碼。
轉(zhuǎn)到工具-》主板-》 Arduino / Genuino Uno-》 選擇板
轉(zhuǎn)到工具-》端口-》 COMx-》 選擇端口
按工具欄中的“驗(yàn)證”按鈕以嘗試對(duì)其進(jìn)行編譯。
如果編譯成功,請(qǐng)按工具欄中的“上傳”按鈕以上傳它。
一旦這樣做,應(yīng)該確認(rèn)它是否正常工作-使用主板上的串行監(jiān)視器,將其設(shè)置為57600波特,以確保每?jī)擅腌姲l(fā)出一次“ READY”。
三、處理源代碼
轉(zhuǎn)到mXY-Plotter-Drawing-Machine processing-source Processing庫文件夾。
將Processing-source Processing庫的內(nèi)容復(fù)制到C: Users YourPCname Documents Processing libraries文件夾中。
復(fù)制polargraphcontroller文件夾并將其粘貼到C: Users YourPCname Documents Processing文件夾。
開放處理
轉(zhuǎn)到文件-》寫生簿-》 polargraphcontroller-》打開polargraphcontroller應(yīng)用程序源代碼。
按工具欄中的“運(yùn)行”按鈕以運(yùn)行草圖。
使用步驟:
一、步進(jìn)電機(jī)規(guī)格設(shè)置
按工具欄中的“設(shè)置”按鈕。
將MM PER REV的值定義為64
將“每步驟的步進(jìn)數(shù)”的值定義為4076
將MOTOR MAX SPEED的值定義為1000
將“電機(jī)加速”的值定義為200
(有關(guān)28BYJ-48步進(jìn)電機(jī)的更多信息在: https://lastminuteengineers.com/28byj48-stepper-motor-arduino-tutorial/)
二、調(diào)整繪制區(qū)域的大小(如果在A4紙上繪圖,請(qǐng)?jiān)O(shè)置A4尺寸)
先標(biāo)記原點(diǎn):這是在中心線上標(biāo)記的魔術(shù)點(diǎn),正好位于機(jī)器頂部邊緣下方120毫米(12厘米)處。
抓取“中心頁面”,然后將“頁面位置Y”值設(shè)置為120。
第二次單擊“中心原點(diǎn)”,并將“原點(diǎn)Y”值設(shè)置為120。
三、伺服電機(jī)(筆)設(shè)置
“筆向上位置”和“筆向下位置”值是伺服電機(jī)的工作角度。
單擊串行端口,然后從連接的設(shè)備列表中選擇Arduino的端口。
選擇正確的端口后,“無串行連接”顯示將變?yōu)榫G色,并顯示已連接的端口號(hào)。
單擊“命令隊(duì)列”,并激活命令傳輸。
單擊上載提升范圍,然后單擊測(cè)試提升范圍并測(cè)試伺服電機(jī)角度。
四、最后設(shè)置-上傳矢量圖像并開始打印
保存您的設(shè)置。每次打開程序時(shí)都加載設(shè)置。
單擊“輸入”選項(xiàng)卡,然后切換到程序的主屏幕。
手動(dòng)將吊船手動(dòng)設(shè)置為“設(shè)置回家”。手動(dòng)移動(dòng)吊船并將其移動(dòng)到先前定義的起始點(diǎn)。在單擊“設(shè)置原位”之前,必須在每幅圖紙之前以這種方式調(diào)整吊船。
完成此調(diào)整后,單擊“設(shè)置原點(diǎn)”和“設(shè)置筆位置”。
單擊“設(shè)置區(qū)域”以指定您的圖形。然后單擊“將框架設(shè)置為區(qū)域”以進(jìn)行繪制所需的所有設(shè)置。
五、 繪制矢量
查找任何矢量繪圖圖像。從任何轉(zhuǎn)換器平臺(tái)將圖像轉(zhuǎn)換為SVG格式。
從程序中選擇“加載向量”后。使用“調(diào)整大小矢量”調(diào)整圖像大小。使用“移動(dòng)向量”將圖像移動(dòng)到所需區(qū)域。然后使用選擇區(qū)域和將框設(shè)置為區(qū)域來調(diào)整要打印的區(qū)域。
單擊“繪制矢量”命令以啟動(dòng)機(jī)器。










評(píng)論