基于MEMS的慣性導航教學實驗系統*
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
引言
慣性導航系統具有導航信息完備、連續,完全自主性和高可靠性的特點,在軍事領域得到了廣泛的應用,慣性技術的發展直接影響了一個國家武器裝備現代化的水平。隨著慣性技術的發展[1],尤其是MEMS技術的日益成熟,慣性系統的成本大幅度降低,慣性技術在民用領域也得到了越來越廣泛的應用。目前,國內高校很多都已經開設了導航及相關專業,但是長期以來都缺乏一個系統的行之有效的教學實驗系統。基于此,設計了一套基于MEMS的慣性導航實驗系統,系統由慣性測量單元,上位機,雙軸電動轉臺及轉臺控制器組成。該慣性測量單元由六軸慣性測量組合[2-4],包含三軸陀螺儀、三軸加速度計,該實驗平臺能滿足導航、制導與控制專業的學生了解慣性導航原理,有助于學生理解、熟悉、掌握慣性導航和運動狀態采集的原理、技術及應用。該系統不僅僅是教學實驗系統,同時,也是一個二次開發平臺,可以作為其他實驗和項目的數據采集驗證平臺。
1 MEMS慣性測量單元
本系統使用的MEMS慣性測量單元為西安中星測控有限公司研發的六自由度慣性測量單元,型號CS-IMU-04A,該MEMS可精確測量載體坐標系中三個正交軸的角速率和線加速度[5]。采用最新MEMS慣性測量元件,并對傳感器輸出噪聲進行了濾波,對溫度漂移、交叉耦合、非線性等誤差項進行了修正,提高了系統測量精度。該產品體積小、可靠性高、功耗小、重量輕、性能穩定,可用于平臺穩定、姿態航向參考系統、導彈制導和控制、飛行器穩定控制、天線穩定、汽車電子等系統。
1.1 工作原理及性能指標
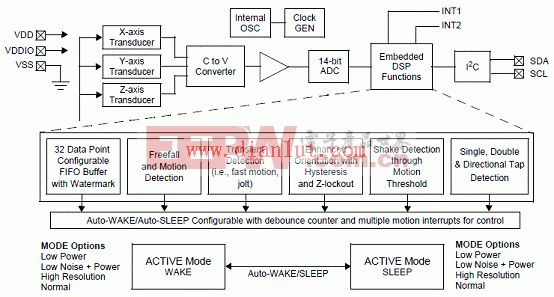
慣性測量單元CS-IMU-04A采用陀螺儀來測量載體的絕對加速度,然后載體的姿態角(俯仰角、偏航角、滾動角)就可以通過陀螺輸出數據的特定的解算方法(如四元數法)來獲得。加速度計可用于確定CS-IMU-04A系列初始姿態角,并修正和確定陀螺在水平方向(俯仰角和滾動角)的漂移。CS-IMU-04A硬件原理如圖1所示。

圖1 CS-IMU-04A硬件框圖
慣性測量單元CS-IMU-04A啟動時間小于1s,角速度陀螺儀(X軸,Y軸和Z軸)測量范圍為±150°/s,零偏≤±0.5°/s,加速度計(X軸,Y軸和Z軸)測量范圍±10g,零偏≤0.02g,工作電壓+10~+30V DC,輸入電流≤200mA(+20VDC)。
1.2 接口定義
CS-IMU-04A慣性測量單元,采用九芯屏蔽電纜與外部設備相連,接口使用RS-422串口通信方式,串口通信協議為8位數據位,1位起始位,1位停止位,無奇偶校驗,波特率115200bps,數據更新率為200Hz。接口的外部特征及信號定義如表1所示。
表1 CS-IMU-04A接口定義

在搭建硬件系統時,上位機與CS-IMU-04A慣性測量單元之間通過RS-422串口進行通信。MEMS通電后,自動通過串口向上位機發送測量數據,因此在硬件設計時,MEMS接口只需要用到VCC、GND、RS422 TX+和RS422 TX-四個端口。
1.3 數據幀格式
每幀CS-IMU-04A向外部發送的數據包含17個字節。其中,第1,2字節為幀起始字節,取值分別為0x7F和0x80。第3~14字節為陀螺儀和加表輸出,共6路數據,其中第3、4字節為X軸加速度計的低、高字節,第5、6字節為Y軸加速度計的低、高字節,第7、8字節為Z軸加速度計的低、高字節,第9、10字節為X軸陀螺儀的低、高字節,第11、12字節為Y軸陀螺儀的低、高字節,其中第13、14字節為Z軸陀螺儀的低、高字節。第15、16位為內部溫度的低、高字節。第17字節為數據幀校驗字,取第3~16字節的算術和的反碼。
每路輸出值由兩字節租出,為帶符號整數,取值范圍-32511~32511。各通道測量值可通過公式計算得到,計算公式如下:
 (1)
(1)
其中:x為通道輸出的測量數據;
Fs為該通道量程,其中加速度計的量程為±10g,角速率陀螺儀量程為±150°/s,溫度的量程為±200℃;
y為通道的實際測量值。
2 轉臺及轉臺控制器
實驗用到的雙軸電動轉臺型號為TT-3DM-2E-10,轉臺控制器型號為CC-3DM-2E-10,均由上海紫航電子科技有限公司研發制造,為MEMS慣性測量單元提供激勵信號,配套有雙軸電動轉臺測控軟件。
2.1 雙軸電動轉臺
雙軸電動轉臺TT-3DM-2E-10采用UO形鋁合金框架結構,轉臺由外環軸俯仰軸框架和內環橫滾軸框架和組成,內外框架軸組成相互垂直的兩維旋轉坐標系,采集控制器串行接口連接上位機實現測量控制。雙軸電動轉臺外形如圖2所示。

圖2 TT-3DM-2E-10雙軸電動轉臺
2.2 雙軸電動轉臺控制器
雙軸電動轉臺控制器用于控制雙軸電動轉臺。轉臺控制器前后面板如圖3所示。


圖3 CC-3DM-2E-10雙軸電動轉臺控制器
前面板:
“啟動”按鈕:測試控制器加電和斷電(直流電)。
后面板:
“ON/OFF”:測試控制器供電開關(AC220V);
“COM1”串口1:通過DL-232和上位機的COM1口連接;
“COM2”串口2:通過DL-232和上位機的COM2口連接;
“CZ1”插座:通過DL1雙軸電動轉臺TT-3DM-2E-10的CZ連接;
“AC 220”插座:交流220V輸入。
2.3 雙軸電動轉臺測控軟件
雙軸電動轉臺測控軟件是系統配套軟件,軟件界面主要分四個功能區:參數設置、主演示、控制臺、串口狀態顯示,另外還有一個數據操作功能選項,如圖4所示。

圖4 雙軸電動轉臺測控軟件
3 軟件設計
上位機軟件通過RS422串行接口與MEMS單元進行通信,完成MEMS輸出數據的采集工作,然后對數據進行相關的處理,再完成數據的存儲與顯示。軟件使用C#語言編程完成[6,7],操作系統Windows7,在功能實現上,通過SerialPort類實現串口通信功能[8],通過多線程計數完成數據的實時采集、處理和顯示。
3.1 系統模塊及功能
軟件主要由串口設置、數據采集、數據處理、數據顯示、數據存儲等模塊組成。
(1)串口設置:此模塊主要用來設置串口端口號及波特率。根據MEMS的通信協議,上位機串口的波特率設置為115200,在軟件窗口初始化時通過SerialPort類的GetPortNames方法獲取當前上位機的串行端口名稱數組,并顯示在窗口端口號的ComboBox控件中,以供用戶進行選擇。串口設置完畢后,通過按鍵,根據當前串口狀態控制串口的開啟或關閉。
(2)數據采集:此模塊主要完成對MEMS輸出的數據進行采集。使用串口的DataReceived事件實現對串口數據的接收處理,當串口處于開啟狀態時,如果從MEMS有數據傳輸過來,就自動觸發DataRecevied事件,再通過該事件注冊的方法完成對串口數據的采集。
(3)數據處理:當接收到MEMS傳輸的一組數據時,將串口數據存儲在臨時數組里,根據MEMS數據幀格式和數據的長度判斷當前數據的有效性。當數據有效時,提取數據幀里的有效數據(陀螺儀角速率信息,加速度計信息,溫度信息),通過公式1得到實際測量值。當數據無效時,直接舍棄當前數據并開始采集下一組數據。
(4)數據存儲:根據數據處理的結果,將最后得到的模擬量數據存儲在數據庫里,可用于后續數據的分析和處理。
(5)數據顯示:根據數據處理的結果,將數據以圖表的形式顯示在系統主界面上。
3.2 系統主界面和運行效果
本系統經過長期運行工作,數據能夠正常采集、處理和顯示。能夠將MEMS輸出數據正確讀取、處理、并按規定格式處理,達到了設計預期效果。系統主界面如圖5所示。

圖5 MEMS微慣組演示系統界面
系統界面分為參數設置區、串口數據接收區、數據顯示區。
(1)參數設置區:在參數設置區,可以對串口端口號和波特率進行設置。在端口號下拉控件里顯示當前上位機可用的串口號,選擇用于接收MEMS數據的串口號即可;在波特率設置選擇波特率,根據MEMS的通信協議,選擇115200即可。參數設置完畢后,點擊“開始測試”按鍵,系統開始工作,此時該按鍵變成“停止測試”,按下此按鍵即可停止當前測試任務,此時該按鍵重新變成“開始測試”。“重置”按鍵可以復位接收的字節數計數器并更新界面。另外,設置了兩個CheckBox,分別是“十六進制顯示”和“自動新行”,可設置串行數據接收區的數據顯示格式。
(2)串口數據接收區:默認選中“十六進制顯示”和“自動新行”,采集的MEMS原始數據將在串口數據接收區的文本框實時顯示十六進制數據,并自動換行;有效數據文本框實時顯示當前接收到的MEMS有效數據。通過分析串行數據接收區的數據,可對數據的有效性進行判斷。
(3)數據顯示區:通過動態顯示的方式,將MEMS輸出的7路信號(三路陀螺儀,三路加表,一路溫度計)以數據曲線的形式顯示在程序界面上。同時通過7個textBox顯示當前慣組各通道的測量值。
4 小結
本文使用MEMS慣性測量單元,上位機,雙軸電動轉臺及轉臺控制器設計了一套基于MEMS的慣性導航實驗系統,經過長時間的使用,系統能夠正常采集、處理和顯示MEMS輸出的數據。該系統有助于學生了解慣性導航原理,理解、熟悉、掌握慣性導航和運動狀態采集的原理、技術及應用。該系統不僅僅是教學實驗系統,同時,也是一個二次開發平臺,可以作為其他實驗和項目的數據采集驗證平臺。
[1] 基金項目:軍內科研項目支持
參考文獻
[1] 薛連莉,陳少春,陳效真. 2017年國外慣性技術發展與回顧[J]. 導航與控制,2018,17(2):1-9.
[2] 成宇翔,張衛平,陳文元,等. MEMS微陀螺儀研究進展[J]. 微納電子技術,2011,48(5):277-285.
[3] 曹玉珍,蔡偉超,程旸. 基于MEMS加速度傳感器的人體姿態檢測技術[J]. 納米技術與精密工程,2010,8(1):37-41.
[4] 伍文雙,馮華君,徐之海,等. 基于MEMS陀螺儀的光學圖像拼接[J]. 光子學報,2018,47(3):221-224.
[5] 楊夢雨,管雪元,李文勝. 基于MEMS/GPS/地磁組合的彈體姿態解算[J]. 電子測量技術,2017,40(4):60-63.
[6] 王琦,王磊,江豪,等. 基于C#的PLC 數據采集監控系統研發與應用[J]. 自動化與儀器儀表,2019,8:176-178.
[7] 姜拓,張劍平. 基于C#的數據采集系統上位機軟件設計與實現[J]. 電子測試,2009,9:58-61.
[8] 周陽,周美嬌,黃波,等. 基于C# 的串口通信系統的設計與研究[J]. 電子測量技術,2015,38(7):135-140.
(注:本文來源于《電子產品世界》雜志2020年10月期)








評論