基于ARM9與LINUX的RS485總線的通信接口設計

摘要:在ARM9處理器S3C2440上設計RS485通信接口,實現與總線上其他設備的通信,利用ARM9處理器內部集成的UART外設和RSM485CT模塊組成RS485通信硬件接口,在嵌入式Linux系統下設計RS485通信程序實現與RS485總線上的其他外設間的數據互通。實驗效果良好,表明該設計是行之有效的。文中在介紹了通信接口的硬件設計、Linux下RS485驅動設計、通信程序設計的同時,重點介紹了Linux系統下RS485通信程序的編寫方法以及RS485總線上設備通信的實現過程。
本文引用地址:http://www.104case.com/article/201809/389051.htm0引言
隨著ARM處理器應用的范圍的不斷深入,根據需求的不同ARM提供的外設也越來越豐富,常用的通信接口有RS232、RS485、CAN、以太網等。RS485總線憑其傳輸距離遠、抗干擾能力強、價格低廉等優點在各種工業場合得到廣泛的應用。設計使用ARM9處理器S3C2440內部集成的UART外設和RSM485模塊構建具有電源隔離、電氣隔離、總線保護的RS485總線接口,通過對嵌入式Linux系統RS232驅動程序的修改,使的在通過該修改后的串口驅動程序發送數據時,自動控制IO來實現RS485通信的方向控制,從而簡化了RS485通信的控制流程,Linux下RS485通信程序通過對該串口的讀寫,實現與RS485總線上的其他設備通信。
1通信接口的硬件設計
S3C2440處理器片內集成了豐富的外設資源,可以方便的實現嵌入式應用中的各種接口通信。設計中用到了Samsung-ARM9-S3C2440,其片內集成的3個UART,在設計中UART0用于嵌入式Linux操作系統的控制臺(console)接口,UART1作為RS232接口與其他RS232接口設備通信,UART3用作RS485的數據通信接口。由于ARM9處理器的IO電平與RS485的電氣標準不同,RS485采用差分信號負邏輯,+2~+6V表示“0”,-6~-2V表示“1”。為了達到RS485總線的電氣特性標準,所以必須要外接電平轉換芯片[1,3-5],同時考慮工業應用環境惡劣等因素,需要考慮RS485總線的電源隔離、電氣隔離、總線保護等因素,設計中用到廣州周立功的RSM485模塊。
RSM485隔離收發器模塊,是集成電源隔離、電氣隔離、RS485接口芯片,總線保護器件于一身。該模塊采用灌封工藝,具有很好的隔離特性,隔離電壓高達2500VDC,最多支持400個節點,最高通信波特率115200。
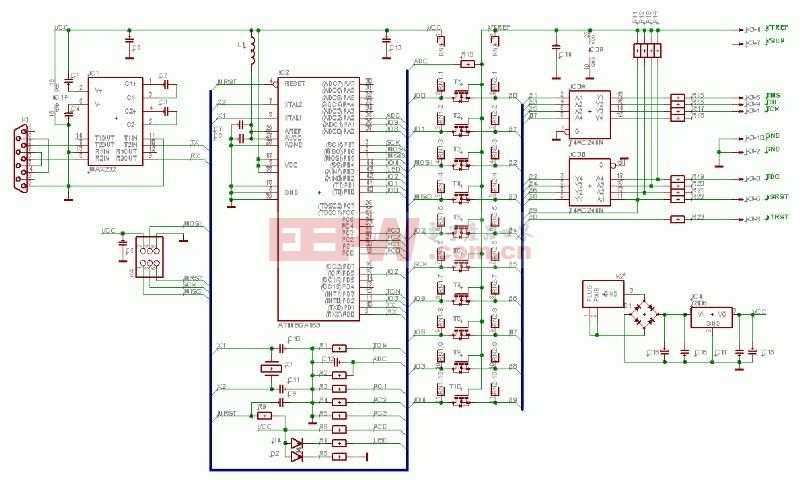
圖1為系統中利用S3C2440中的UART2實現半雙工的RS485總線的原理圖,在同一時刻里數據只能往一個方向傳輸。其中的引腳CON為接收、發送控制腳,現在將其與S3C2440的IO引腳相連,由該引腳的電平控制芯片數據的方向。要發送數據時將其置0,接收數據時將其置1。
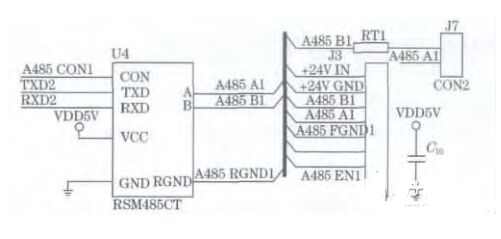
圖1S3C2440-485接口
2軟件設計
2.1RS485通信設計
圖2中首先打開驅動部分針對RS485通信修改過的串口2,設置其串口參數,此時串口2處于RS485總線接收模式,然后向總線上第一個設備節點發送數據讀取指令,完成select函數調用圖1S3C2440-485接口初始化后,select函數根據用戶設定的超時時間,等待設備返回數據,若select函數返回異常,則重新進行初始化,若在設定時間內,未接受到從設備的數據,select函數返回超時,則重設下一從設備節點等待超時時間,并發送下一設備數據讀取指令,重新進入select等待設備返回數據;若在設定時間內,接到從設備返回數據,則從串口接收緩沖讀取數據,并完成用戶協議數據解析,完成一次主從設備的數據通信,然后輪詢到下一設備。
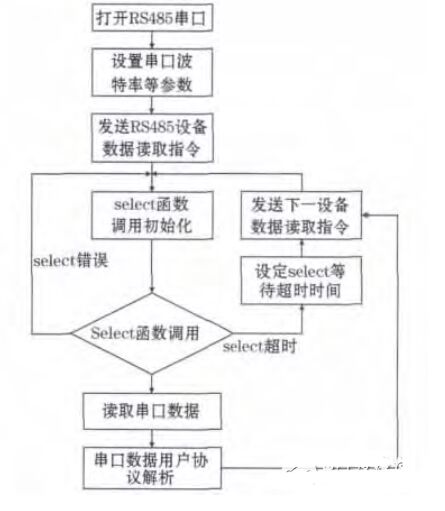
圖2RS485通信軟件流程
2.2RS485驅動設計
設計中使用ARM9處理器S3C2440內部集成的UART外設和RSM485模塊構建而成,其驅動程序與RS232驅動程序相比多了一個通信方向控制引腳的控制,所以在Linux操作系統中,完全可以借助內核的串口驅動添加方向控制IO相關代碼即可實現[4,6,7]。在linux2.6.32內核源碼中,串口驅動相關代碼在文件linux-2.6.32.2/drivers/seria/samsung.c中,為了實現RS485的通信,修改部分主要包括3個部分:
(1)在串口驅動的初始化代碼中加入RS485通信方向控制IO口設備的初始化工作,關鍵代碼片段為:
if(port-》line==2){//如果初始化的是串口2
s3c2410_gpio_cfgpin(S3C2410_GPH0,S3C2410_GPH0_OUTP);//將GPG2,設為輸出功能
s3c2410_gpio_setpin(S3C2410_GPH0,0);//設為高電平,使串口啟動時處于接收數據狀態。
RS485方向控制IO口初始化使用到了2個內核函數(在arch/arm/plat-s3c24xx/gpio.c),其函數原型為:
voids3c2410_gpio_cfgpin(unsignedintpin,unsignedintfunc-TIon)
此函數的功能是設置引腳的功能,參數pin是要設置的引腳,對應著是GPH0也即是S3C2410_GPH0引腳,參數funcTIon是要設置引腳的功能,設置中用到的是輸出功能,所以該值是S3C2410_GPH0_OUTP.
voids3c2410_gpio_setpin(unsignedintpin,unsignedintx)
此函數的功能是設置引腳的輸出值,參數pin是要設置的引腳,參數x是要設置引腳的輸出值0或者1.
(2)在串口數據開始發送前,將方向控制IO置0,使的RSM485處于發送狀態,關鍵代碼片段如下:
if(port-》line==2){s3c2410_gpio_setpin(S3C2410_GPH0,1);//設為低電平,使串口啟動時處于接收數據狀態。
udelay(30);//等待方向IO控制腳狀態穩定}
在設置方向控制IO口狀態后,加入一定延時,等待方向IO控制腳狀態穩定,避免出現由于方向控制狀態不穩定導致發送數據出錯。
(3)在串口數據發送完成后,自動進入到數據接收模式,關鍵代碼片段為:
if(port-》line==2){
while(!(rd_regl(port,S3C2410_UTRSTAT)0x04));//等待串口發送完成,這句千萬不能少
s3c2410_gpio_setpin(S3C2410_GPH0,0);}
由于S3C2440處理器自帶串口帶有硬件緩沖區,串口驅動中,數據發送完成是指數據已有驅動程序全部寫入到發送緩沖中,但此時串口數據并為正在發送出去,所以必須等待數據完全發送完成后,再將方向控制IO口置1。







評論