基于Matlab/Simulink 的二階控制系統仿真研究

0 引言
本文引用地址:http://www.104case.com/article/201809/388663.htm大部分實際控制工程都是復雜的高階系統,通常可將其分解為若干個一階慣性環節和二階振蕩環節的疊加。在研究復雜控制系統的過程中,往往通過主導極點和偶極子相消的方法,將高階系統簡化為二階等低階系統的組合,再根據對二階控制系統輸出和性能的分析,對控制系統偏差進行校正,從而獲得滿足設計指標和使用要求的高階系統性能。因此,掌握二階控制系統動態特性理論,構建二階控制系統動態特性的測試系統,可大大簡化系統分析,對控制系統的分析和設計具有重要作用。
Simulink 是一種以Matlab 為基礎的實現交互式動態系統建模、仿真與分析的軟件包,可以針對控制系統等進行系統建模、仿真、分析等工作,被廣泛應用于線性控制系統、非線性控制系統、數字控制及數字信號處理的建模和仿真中。本文介紹基于Matlab/Simulink 仿真環境下,通過單位階躍信號作用,利用仿真實例對二階控制系統進行仿真研究,直接觀察和分析二階控制系統輸出性能的變化,充分體現了Matlab/Simulink仿真直觀和方便的特點。
1 二階控制系統模型
能夠用二階微分方程描述的系統稱為二階控制系統。在控制工程實踐中,二階控制系統十分常見,例如,電樞控制的直流電動機,RLC網絡和彈簧-質量-阻尼器組成的機械位移系統等。此外,許多高階系統在一定條件下,常常近似地作為二階控制系統來研究。因此,詳細討論和分析二階控制系統的特性,具有極為重要的實際意義。典型二階控制系統數學模型結構如圖1所示。
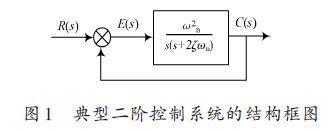
其閉環傳遞函數為:
式中:ζ為系統阻尼比;ωn為無阻尼自然振蕩角頻率,單位為rad/s.二階控制系統的動態特性可由以上兩個參數描述。二階控制系統在單位階躍信號作用下,其輸出響應可分為以下幾種情況:
(1)當ζ=0時,二階控制系統為零阻尼狀態。系統有一對共軛虛根,系統單位階躍響應為無阻尼等幅振蕩曲線。
(2)當0ζ1 時,二階控制系統為欠阻尼狀態。系統的極點為共軛復數,位于S 左半平面。系統單位階躍響應由穩態響應和瞬態響應兩部分組成,穩態響應為1,瞬態響應為振蕩衰減過程,振蕩角頻率由阻尼比ζ和無阻尼自然振蕩角頻率ωn決定,并且隨著ζ的減小,其振蕩幅度加大。
(3)當ζ=1時,二階控制系統為臨界阻尼狀態。系統具有兩個相同的實數極點,位于S 左半平面。系統單位階躍響應為無超調,無振蕩單調上升的曲線,不存在穩態誤差。
(4)當ζ>1時,二階控制系統為過阻尼狀態。系統具有兩個不等的實數極點,位于S左半平面,系統單位階躍響應與臨界阻尼情況相似,為無超調,無振蕩單調上升的曲線,但它的過渡過程時間較之臨界阻尼更長。
2 二階控制系統仿真設計與研究
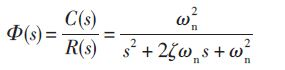
2.1 二階控制系統仿真結構設計
啟動Matlab 7.04,進入Simulink 仿真界面,根據二階控制系統數學模型結構,設計二階控制系統的Simu-link仿真結構如圖2所示。雙擊各函數模塊,在出現的各參數對話框內設置相應的參數,仿真時輸入單位階躍信號,起始時間為0,分別改變ωn 和ζ的值,點擊simula-tion菜單下的start命令進行仿真,雙擊示波器模塊觀察仿真結果,得到系統的階躍響應曲線,再進行分析ωn和ζ對系統動態性能的影響。
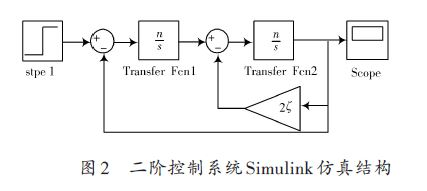
2.2 二階控制系統單位階躍響應與參數ζ的關系
設定ωn=10 rad/s 不變,改變參數ζ分別為0,0.25,1和2的二階控制系統Simulink仿真結構如圖3所示,輸入單位階躍信號,其仿真響應曲線如圖4所示。從圖中實驗數據分析可以看出,響應曲線由上至下,依次為無阻尼等幅振蕩曲線,欠阻尼振蕩衰減曲線,臨界阻尼和過阻尼無超調單調上升曲線。當0ζ1 時,二階控制系統欠阻尼狀態ζ變化的階躍響應曲線如圖5所示。隨著ζ 的增大,系統單位階躍響應的超調量減少,但上升時間加長,曲線峰值較大,因此,綜合考慮超調量和上升時間兩個因素,應選擇ζ 接近最佳阻尼比0.707.




評論