利用3D光學(xué)和聲學(xué)影像的抽血機器人可實現(xiàn)幾乎100%一次抽血成功

在美國,抽血師每年大約要抽血14億次。這是使用的最為廣泛的醫(yī)學(xué)臨床手段。隨著一代人的變老,每年的抽血檢查次數(shù)也會更多。一次性的準(zhǔn)確度依賴于患者的生理機能和醫(yī)生的經(jīng)驗。人類的準(zhǔn)確度估計大約在50%左右。這并不高,特別如果你是一個很難找到靜脈的人。
本文引用地址:http://www.104case.com/article/201809/388243.htm
VenousPro的原型設(shè)計提出了三個主要挑戰(zhàn):
• 首先,設(shè)備需要是安全的,這意味著可重復(fù)性和確定性的執(zhí)行
• 其次,設(shè)備需要高便攜性,以便在臨床環(huán)境下大范圍使用。
• 最后,系統(tǒng)需要通過FDA嚴(yán)格的評估
首套原型編程使用MathWorks的MATLAB完成。隨著VenousPro設(shè)計更加復(fù)雜和工程團隊的擴增,VascuLogic意識到他們需要一個更集成的開發(fā)平臺。公司提出申請并且收到了國家儀器(NI)的醫(yī)用設(shè)備創(chuàng)新基金,同時還同意定制NI硬件,LabVIEW和NI培訓(xùn)和認(rèn)證項目。VascuLogic使用國家儀器的CompactRIO 可重配置的監(jiān)控系統(tǒng)來控制機器人,建造了第二代VenousPro原型。
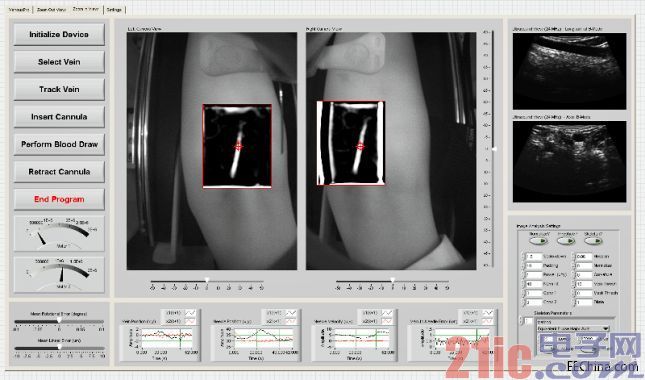
兩個增強靈敏度的近紅外GigE vision的攝像頭和一個超聲波探針為CompactRIO控制器提供了影像信息。一塊 Xilinx Spartan-6 FPGA實現(xiàn)了圖像流水線。圖像處理流水線使用了NI視覺開發(fā)模塊的先進的算法,圖像中提取的3D位置和速度信息以每秒20幀與CompactRIO運動控制模塊通信。CompactRIO系統(tǒng)指揮機器針的機械手。
VenousPro設(shè)備的核心含有NI CompactRIO-9025實時控制器的5個I/O模塊,其中4個 NI 9514 C系列帶有編碼反饋模塊的伺服驅(qū)動接口指揮4自由度的微型機器手,1個NI 9401 C系列數(shù)字I/O模塊提供了雙向通信的8個通道。
公司將MATLAB代碼轉(zhuǎn)換成LabVIEW可視化設(shè)計并開發(fā)了直觀的用戶界面。VenousPro設(shè)備運用了NI LabVIEW的機器人模塊里的的運動學(xué)、PID和路線規(guī)劃VI,例如用針尖的3D笛卡爾坐標(biāo)關(guān)聯(lián) 機器人臂的關(guān)節(jié)角。它還使用了LabVIEW控制設(shè)計和仿真模塊,根據(jù)當(dāng)前卡爾曼濾波后的速度分布,來預(yù)測未來的位置。通過使用LabVIEW Multicore Analysis和Sparse MatrixToolkit,加速大型矩陣的復(fù)雜的數(shù)學(xué)運算。
原本第二個原型的開發(fā)計劃有3個月的開發(fā)周期,但只花了3周因為LabVIEW環(huán)境的靈活性和模塊化設(shè)計。因此,VascuLogic超前完成了人前、體外、概念證明的測試。
迄今,VascuLogic已經(jīng)證明在多個體外研究下超過98%的一次性準(zhǔn)確率。公司打算升級到新的多核CompactRIO硬件,將用戶界面引入NI觸摸板,取消PC主機。在NI平臺上開發(fā),VascuLogic能夠提前五個月以低于預(yù)算$50,000的價格交付設(shè)備,以供臨床測試。
注意:VascuLogic的Alvin Chen和Max Balter將這個項目提交給2014 NI工程影響力獎評選。它在機器控制組中獲勝。它還獲得了NI社區(qū)選擇獎和NI的人道主義獎。

評論