基于超聲波傳感器的車載超重監(jiān)控報警系統(tǒng)

6)GPS模塊選用REB3571。GPS與單片機的硬件接口使用RS232通信標準。將GPS的TXD接單片機的RXD、GND接GND與單片機進行串口通信。系統(tǒng)上電,GPS定位成功后,通過TXD不斷輸出定位信息,系統(tǒng)在串行中斷函數(shù)中,不斷接收定位信息放到緩存數(shù)組中,通過對GPRMC信息的解析,提取出經(jīng)緯度。GPS與單片機的連接電路如圖4所示。
本文引用地址:http://www.104case.com/article/201808/387652.htm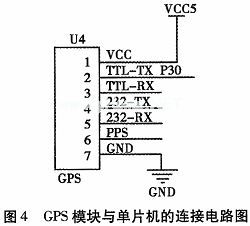
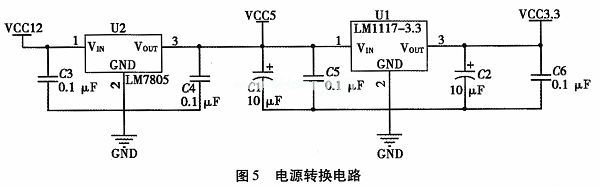
7)系統(tǒng)供電電源總共包括以下幾部分:NRF24L01需要3.3 V供電,GSM模塊需要12 V供電,其余器件均需要5 V供電,而汽車電瓶為12 V,所以將12 V通過5 V穩(wěn)壓芯片LM7805得到5 V電源,再將5 V電源通過3.3 V穩(wěn)壓芯片LM1117得到3.3 V電源。電源轉(zhuǎn)換電路如圖5所示。
2.6 軟件設計與實現(xiàn)
本系統(tǒng)的軟件設計采用模塊化編程,將各部分的功能模塊化,易于程序的修改與移植。
本系統(tǒng)的軟件設計主要包括兩個模塊:測重模塊和主控模塊。測重模塊的流程圖如6所示。
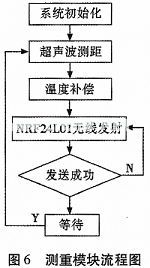
測重模塊工作時,先完成對超聲波傳感器,溫度傳感器以及NRF24L01的初始化,之后超聲波傳感器開始測距,根據(jù)溫度傳感器采集到的溫度對測得的數(shù)據(jù)進行溫度補償,再將數(shù)據(jù)通過NRF24L01無線發(fā)射到主控模塊,若發(fā)送成功,等待一段時間再循環(huán)測距,若發(fā)送失敗,重新發(fā)送。
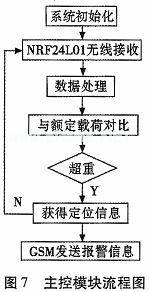
主控模塊的流程圖如圖7所示。模塊上電后完成對GPS模塊、GSM模塊的初始化,NRF24L01接收測重模塊發(fā)送的數(shù)據(jù),對三個模塊的數(shù)據(jù)綜合處理后,與額定載荷相對比,判斷車輛是否超重,若超重,即將GPS的定位信息以及車牌號發(fā)送給監(jiān)控中心,否則,重新接收數(shù)據(jù)。
3 監(jiān)控中心
監(jiān)控中心是基于Microsoft Visual C++6.0平臺實現(xiàn)的,主要功能是通過GSM模塊接收車載檢測子系統(tǒng)發(fā)送的報警信息,對信息進行分析處理,保存到數(shù)據(jù)庫中。
監(jiān)控中心的實現(xiàn)主要包括三個部分:用MSComm控件實現(xiàn)GSM模塊與計算機的串行通信;在VC平臺上使用ADO訪問Access數(shù)據(jù)庫完成對報警信息的保存、查看等操作;使用WebBrowser控件調(diào)用谷歌地圖,根據(jù)經(jīng)緯度信息,查看車輛具體的地理位置。
3. 1 MSComm控件
GSM模塊與計算機的串行通信使用RS232通信標準,硬件連接直接使用USB轉(zhuǎn)串口線將GSM的串口與計算機的USB口相連。軟件實現(xiàn)是通過在VC平臺上添加MSComm控件,使用MSComm控件完成對通信串口的設置、發(fā)送AT指令給GSM模塊并接收GSM模塊的報警信息。
3.2 使用ADO訪問Access數(shù)據(jù)庫
本系統(tǒng)使用數(shù)據(jù)庫是為了實現(xiàn)對報警信息的保存、查看的操作,處理數(shù)據(jù)量不大,而且對數(shù)據(jù)庫的操作比較簡單,所以選擇使用Access數(shù)據(jù)庫,并選擇使用ADO數(shù)據(jù)庫訪問技術訪問Access數(shù)據(jù)庫。ADO(ActiveX Data Objects)是一個便于使用的應用程序?qū)咏涌冢饕膬?yōu)點是易于使用、速度快、內(nèi)存開銷小,它使用最少的網(wǎng)絡流量,并且在前端和數(shù)據(jù)源之間使用最少的層數(shù),它是一個輕量、高性能的接口。
4 結(jié)束語
本文介紹了一種基于超聲波傳感器的車載超重監(jiān)控報警系統(tǒng),介紹了本系統(tǒng)的創(chuàng)新點,以及該系統(tǒng)的各個部分的工作原理、設計與實現(xiàn)。經(jīng)實踐證明,本系統(tǒng)很好地達到預期效果,安裝方便,性能穩(wěn)定,效果良好。但是,因為超聲波傳感器是通過測量車軸與車梁間的相對位移來間接檢測車輛是否超重,所以,需要定期對因車載重量引起的車輛的車軸與車梁間的相對位移進行標定,并更新數(shù)據(jù)庫中車輛的額定載荷的數(shù)據(jù)。











評論