高性能V/f控制在中壓變頻器中的實現

如果在直流側大電容的作用下Ed恒定,那么電流Id將與Tf1成正比,隨著負載的加重,轉矩增加,總可以通過適當降低f1使Id限制在特定的水平下。為保證電流限制功能的實現,還要適當調節輸出電壓,為此設計了一種特殊的PI調節器,用于限制最大電流,實現挖土機特性。
最大電流限制調節的部分結構框圖見圖5,最大電流限制PI 調節器,以允許的最大電流(由參數P106設置)為給定值,以“定子電流3/2變換及分解”模塊輸出的電流有效值(標么值)為反饋量,輸出兩個相同的調節量駐f(頻率調節量,由變量KK0118給出)和駐u(電壓調節量,由變量KK0119給出),駐u 起輔助作用,用比例系數P121來調節。需要說明的是,雖然這里的電流反饋值是有效值,但它是通過A、C兩相電流瞬時值實時計算的(電流矢量幅值),因此,
可以滿足電流調節的動態要求;PI 調節器是針對限制最大電流的,電流只能從大(超過最大允許值)向小調,而不能從小向大調,因此,調節器輸出必須限
幅(小于零)。根據變頻器電流限制的需要,本文設計的PI調節器與普通PI調節器有兩點不同,即有兩個輸出調節量和輸出限幅。
為了方便,設計的數字PI 調節器采用了增量式算法,以限制起動電流實驗來驗證最大電流限制調節器的調節效果。
實驗中電壓調節量的輸出KK0119 的比例系數P121=1.0,各個參數意義羅列如下:
P100為PI調節器的積分增益;
P113為PI調節器的比例增益;
P106為允許的最大電流有效值(標么值);
P107為選擇最大電流模擬量連接子;
KK0102為反饋的實際電流有效值(標么值,數字濾波之前);
KK0103為反饋的實際電流有效值(標么值,數字濾波之后);
P101為實際電流有效值濾波時間常數;
KK0118為頻率調節輸出量。
圖6給出了限制起動電流的實驗波形圖,其中圖6(a)和圖6(b)的實驗參數是:P100=50 ms,P113=0.05,P106=13%,P101=1000ms,控制反饋量KK0103,圖6(a)給出的是KK0118(1 波)和KK0103(2 波)的波形,圖6(b)給出的是KK0118(9波)和KK0102(10波)的波形;圖6(c)的實驗參數是:P100=50ms,P113=0.10,P106=13%,控制反饋量KK0102,圖6(c)給出的是KK0118(7波)和KK0102(8波)的波形。

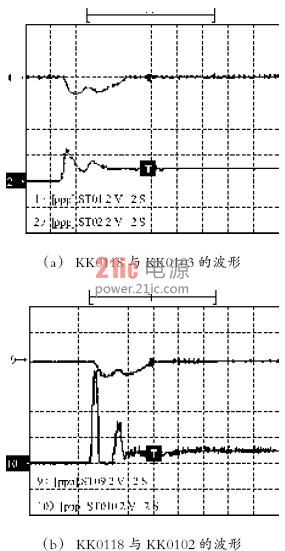
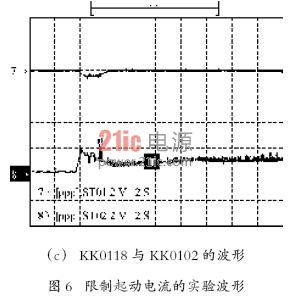
從圖6(a)和(b)可以看出,以濾波之后的電流有效值作為反饋,由于反饋信號的延時,使得控制量輸出滯后,雖然調節器實現了對濾波后電流KK0103的較好控制[如圖6(a)],但是此時對實際的電流值KK0102 的控制并不好[如圖6(b)],電流動態峰值達到了7 A左右,而實際的允許最大電流值為1.3 A,達不到無“跳閘”的目的;為了實現限制動態電流的目的,圖6(c)增大了比例增益,并用無延時的KK0102為反饋,這時動態電流最大值被限制在2 A 左右,對比圖6(b)可以發現,圖6(c)較好地實現了限流的目的。更為恰當地調節參數,可以使調節器的調節效果更好。
5 結語
綜上所述,只要調節好定子電阻(IR降)補償、轉差補償器和最大電流限制控制器的參數,會使調節器的調節效果較好;同時由于用于電流限幅的給定值P106,是為了限制過載設置的,它的值要比“跳閘”的過流值小,因此本文設計的調節器可以起到限制最大電流的作用,以實現挖土機特性。





評論