感應(yīng)電機(jī)間接自控制技術(shù)研究

0 引言
本文引用地址:http://www.104case.com/article/201808/387270.htm上世紀(jì)70 年代德國學(xué)者提出的感應(yīng)電機(jī)磁場(chǎng)定向矢量控制技術(shù)使交流電機(jī)變頻調(diào)速技術(shù)產(chǎn)生了質(zhì)的飛躍。它使交流電機(jī)具有類似直流電機(jī)的調(diào)速性能,加上感應(yīng)電機(jī)本身結(jié)構(gòu)上的優(yōu)點(diǎn),從而掀起了一場(chǎng)交流電氣傳動(dòng)取代直流電氣傳動(dòng)的浪潮。隨后感應(yīng)電機(jī)直接轉(zhuǎn)矩控制技術(shù)(Direct Torque Control)[1][2] 自問世以來就以其清晰的物理概念,簡(jiǎn)單的控制結(jié)構(gòu)和獨(dú)特的磁鏈與轉(zhuǎn)矩調(diào)節(jié)器以及良好的動(dòng)態(tài)性能吸引眾多的學(xué)者對(duì)其研究。直接轉(zhuǎn)矩控制技術(shù)已經(jīng)成功應(yīng)用在歐洲1 000多臺(tái)機(jī)車與地鐵車輛的變頻傳動(dòng)系統(tǒng)和瑞士ABB
公司的ACS600 系列標(biāo)準(zhǔn)變頻器上,實(shí)踐表明采用DTC 技術(shù)可以更加快速、靈活的控制交流電動(dòng)機(jī),并可以實(shí)現(xiàn)多樣化的新控制功能。經(jīng)過幾十年的發(fā)展,直接轉(zhuǎn)矩控制技術(shù)的具體形式呈現(xiàn)出多樣化,有學(xué)者引入磁場(chǎng)定向技術(shù)、引入滑模控制技術(shù)、模糊控制技術(shù)以及神經(jīng)網(wǎng)絡(luò)控制技術(shù)等[3~6],分別針對(duì)電壓空間矢量的選擇以及傳統(tǒng)直接轉(zhuǎn)矩控制技術(shù)中存在的較大轉(zhuǎn)矩脈動(dòng)進(jìn)行研究。文獻(xiàn)[6]針對(duì)在傳統(tǒng)直接轉(zhuǎn)矩控制系統(tǒng)中,根據(jù)電機(jī)的運(yùn)行狀態(tài),估算出電壓空間矢量作用的占空比,從而可以改善低速時(shí)的轉(zhuǎn)矩脈動(dòng)。文獻(xiàn)[7~11]等針對(duì)適用于大功率電力牽引應(yīng)用場(chǎng)合中的一種稱之為間接自控制的技術(shù)(也有稱為間接定子參量控制或者間接轉(zhuǎn)矩控制)進(jìn)行了研究,與傳統(tǒng)直接轉(zhuǎn)矩控制技術(shù)相比,它可以控制逆變器開關(guān)頻率穩(wěn)定在較低值的情況下,對(duì)轉(zhuǎn)矩進(jìn)行高性能的控制,并能有效地減小轉(zhuǎn)矩的脈動(dòng)。
1 間接自控制技術(shù)(Indirect Self Control)
1.1 ISC的技術(shù)背景
三相交流感應(yīng)電機(jī)轉(zhuǎn)矩公式采用定子磁鏈與轉(zhuǎn)子磁鏈可以描述為[11]
的運(yùn)算,以確定新的定子電壓矢量。
如果能夠采用空間矢量脈寬調(diào)制技術(shù)(SVPWM),那么就可以對(duì)定子磁鏈在一個(gè)PWM 周期Ts內(nèi)的運(yùn)動(dòng)軌跡進(jìn)行良好的控制:在動(dòng)態(tài)過程中,可以在電壓型逆變器本身輸出能力的限制下,控制定子磁鏈?zhǔn)噶肯嘟且宰羁斓乃俣茸兓瑥亩涌祀姍C(jī)轉(zhuǎn)矩的響應(yīng)速度;在穩(wěn)態(tài)時(shí),采用SVPWM技術(shù)控制定子磁鏈?zhǔn)噶肯嘟遣⑵漵r 穩(wěn)定在某一個(gè)值上,從而可以減小轉(zhuǎn)矩的脈動(dòng)。尤其是當(dāng)感應(yīng)電機(jī)運(yùn)行于低速時(shí),轉(zhuǎn)矩波動(dòng)就會(huì)顯著減小,因而性能有較大的提高[11]。
1.2 ISC技術(shù)的原理
從在前面的分析中可看出,針對(duì)定子磁鏈幅值與電機(jī)轉(zhuǎn)矩的雙閉環(huán)控制的直接轉(zhuǎn)矩控制系統(tǒng)可以轉(zhuǎn)換為針對(duì)定子磁鏈幅值及其相角進(jìn)行雙閉環(huán)的控制系統(tǒng),也即是針對(duì)定子磁鏈?zhǔn)噶窟M(jìn)行閉環(huán)控制的系統(tǒng),這就是間接自控制技術(shù)的出發(fā)點(diǎn)。
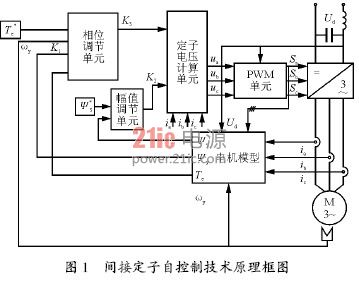
圖1 給出了本文研究的一種實(shí)用的間接定子自控制技術(shù)原理框圖。圖中控制系統(tǒng)的核心單元是定子電壓矢量計(jì)算單元,它根據(jù)轉(zhuǎn)矩閉環(huán)控制單元輸出定子磁鏈?zhǔn)噶康南嘟窃隽縆3 與定子磁鏈幅值調(diào)節(jié)單元輸出的定子磁鏈幅值增量K2,以及檢測(cè)到的定子電流計(jì)算出定子電壓矢量的給定值。PWM單元根據(jù)定子電壓矢量給定值與直流回路電壓計(jì)算得到電壓型逆變器的開關(guān)信號(hào)Sa、Sb、Sc。控制系統(tǒng)中所需要的定子磁鏈、轉(zhuǎn)子磁鏈以及電機(jī)轉(zhuǎn)矩是通過圖中的電機(jī)觀測(cè)模型計(jì)算得到的。下面針對(duì)ISC 控制系統(tǒng)中的關(guān)鍵模塊進(jìn)行詳細(xì)分析。
1.3 各部分模塊的工作原理
1.3.1 電機(jī)轉(zhuǎn)矩的閉環(huán)控制
電機(jī)轉(zhuǎn)矩的閉環(huán)控制是通過對(duì)定子磁鏈?zhǔn)噶康南辔徽{(diào)節(jié)實(shí)現(xiàn)的,如圖2 所示。由參考文獻(xiàn)[10]知道,電機(jī)的轉(zhuǎn)矩在轉(zhuǎn)子磁鏈同步旋轉(zhuǎn)坐標(biāo)系中可以表示為
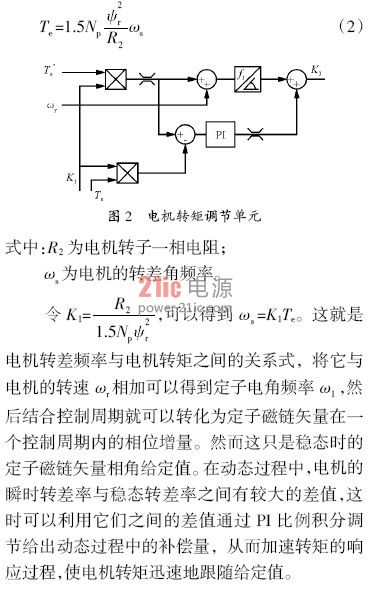
1.3.2 定子磁鏈幅值調(diào)節(jié)單元
在磁鏈幅值處于變化過程中時(shí),就需要進(jìn)行磁鏈幅值的調(diào)節(jié),這時(shí)引入控制量K2。

K2表示下一時(shí)刻定子磁鏈幅值的目標(biāo)值與當(dāng)前時(shí)刻定子磁鏈幅值之間的差值。當(dāng)處于穩(wěn)態(tài)時(shí)K2=0,表示不需要對(duì)定子磁鏈的幅值進(jìn)行調(diào)節(jié)。
1.3.3 定子電壓矢量的計(jì)算單元
定子電壓矢量計(jì)算示意如圖3 所示。
定子電壓矢量計(jì)算單元是ISC控制系統(tǒng)的核心模塊,它用來計(jì)算下一個(gè)PWM周期內(nèi)應(yīng)施加在電機(jī)定子端的電壓矢量。圖中以定子磁鏈?zhǔn)噶磕?/p>

2 感應(yīng)電機(jī)間接自控制變頻調(diào)速系統(tǒng)的仿真研究
2.1 系統(tǒng)參數(shù)與運(yùn)行指令的設(shè)定
下面采用著名的仿真軟件Matlab 對(duì)一臺(tái)交流異步電機(jī)進(jìn)行仿真分析,電機(jī)的額定功率是190 kW,定子一相電阻為0.024 贅,轉(zhuǎn)子一相電阻為0.013 75 贅,定轉(zhuǎn)子互感為8.05 mH,定子自感為8.35 mH,轉(zhuǎn)子自感為8.51 mH,直流回路電壓為750 V。牽引系統(tǒng)的速度指令在0.5 s臆t約2 s時(shí)為500 r/min,在2 s臆t約3 s 時(shí)為1 000 r/min,在3 s臆t時(shí)為100 r/min。
2.2 系統(tǒng)關(guān)鍵單元的設(shè)定
2.2.1 定子電流的限幅
與傳統(tǒng)直接轉(zhuǎn)矩控制技術(shù)類似,間接自控制技術(shù)中也沒有直接對(duì)定子電流進(jìn)行控制,但是可以通過以下幾點(diǎn)來避免出現(xiàn)較大的沖擊電流:
1)在定子磁鏈的建立過程中,對(duì)定子磁鏈建立的速度進(jìn)行限制,這樣可以避免出現(xiàn)較大的激磁電流;
2)在給定階躍轉(zhuǎn)矩指令的情況下,系統(tǒng)可能會(huì)出現(xiàn)較大的轉(zhuǎn)差角頻率給定值從而產(chǎn)生沖擊電流,為此需要進(jìn)行限幅,這里設(shè)置為依15 rad/s;
3)在圖3中出現(xiàn)的定子磁鏈?zhǔn)噶糠窃隽縆3,當(dāng)出現(xiàn)轉(zhuǎn)矩階躍指令時(shí),也會(huì)較大,這里限幅
為依0.8 rad。












評(píng)論