水下機器人嵌入式控制系統設計和運動控制仿真-

ROV在水底的前進和轉向運動通過控制兩個螺旋槳推進器來實現。給定參數為航速和航向角,輸出為兩個推進器的推力。這里航向角控制器選擇PID調節器。只有兩個推進器,推力分配算法簡單。
本文引用地址:http://www.104case.com/article/201808/386781.htm5 仿真研究為了驗證水下探測ROV設計的合理性,進行了仿真研究。5.1 水下機器人模型建立水下機器人6自由度運動模型的各個自由度彼此之間存在耦合,由于水下探測ROV常在低速下運動,可以將其運動分解為為水平面運動(包括狀態變量
)和垂直面運動(包括狀態變量

)兩部分,并且認為這兩個自由度之間不存在耦合關系。結合本文研究對象的情況,設計方案中ROV的外形為左右、前后對稱,且重力、浮力分布可使其保持水平狀態,無橫傾或縱傾。其在水平面運動過程中,ROV滿足條件:

此外,由于其只沿縱向平行安裝兩個水平推進器,推進器的作用只限于產生水下機器人的進退和轉艏運動。當左右推進器產生相同推力矢量時可引起進退運動,而當兩者產生大小或方向不同的推力時則可引起轉艏運動。根據上述假設和條件可以得到ROV在水平面內的簡化模型:
式中:

——包含附加質量的質量和轉動慣量;


—沿

方向的流體阻力中線性項和非線性項;
——繞Z軸轉動方向的流體阻力的線性項和非線性項;

——為推進器產生的X軸向力和繞Z軸的轉艏力矩。ROV采用壓載水艙進行垂直面的位置控制,其在垂直面的模型可以簡化為:

式中:
——包含附加質量的質量;
——沿Z方向流體阻力的線性項和非線性項;

——壓載水艙產生的垂向作用力。5.2 仿真驗證
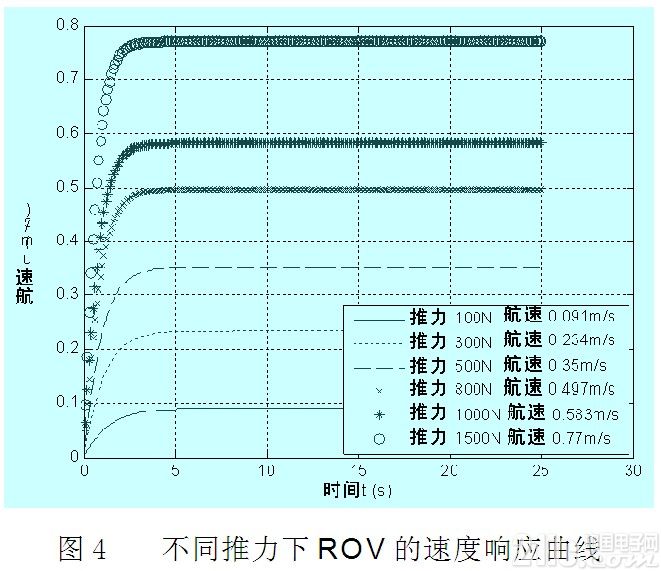
仿真情況設定為:ROV由初始靜止狀態開始運動。為實現直航,需保持左右推進器輸出相同大小和方向的推力。不同推力情況下ROV的速度響應曲線如圖4所示。由速度響應曲線可以發現,其速度經過一段時間的增加后最終保持在一定的數值,此時推力與阻力達到動態平衡,ROV作勻速直線航行。令

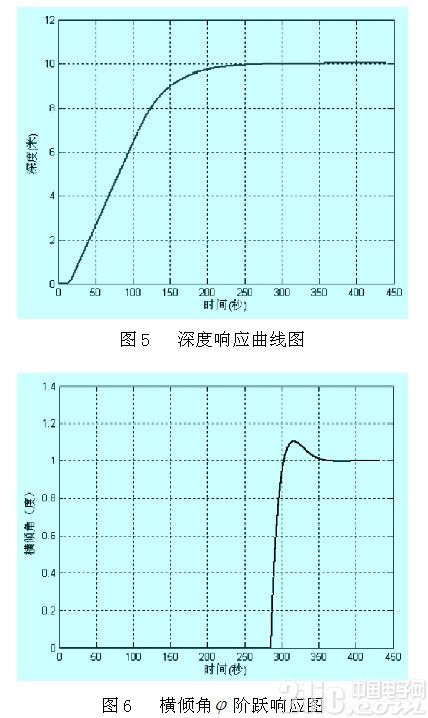
表示ROV在大地坐標系下的位置和姿態。圖5為ROV由初態
控制ROV垂直下潛到10米處懸停。ROV橫傾角

的控制是通過調節特種ROV左右兩個浮力調節艙的不同的注、排水量來產生左右兩個浮力調節艙的浮力差,即產生旋轉運動的偏傾力矩。其仿真結果如下圖6所示。從仿真實驗結果看出所設計的ROV深度協調控制器達到了預期的控制效果。
6 結束語本文介紹了開架式水下探測機器人的結構、傳感器系統,基于AT91RM9200處理器設計了ROV嵌入式控制器。建立了ROV的數學模型,提出了ROV垂直面協調運動控制的方法,并進行了深度和橫傾角協調控制仿真。仿真實驗證明控制器設計的有效性。
參考文獻:[1] 徐玉如,龐永杰,甘永.智能水下機器人技術展望[J].智能系統學報,2006,1(1):9-16.[2] 封錫盛,劉永寬.自治水下機器人研究開發的現狀和趨勢[J].高技術通訊,1999,(9):55-59.[3] 甘永,王麗榮,劉建成.水下機器人嵌入式基礎運動控制系統[J].機器人,2004,26(3):25-29.[4] MICHAEL J,RUTH A.Robust depth and speed control system for a low-speed undersea vehicle[C].Proceedings of the Symposium on Autonomous Underwater Vehicle Technology.1990:51-58.[5] 戴學豐,邊信黔.6自由度水下機器人軌跡控制仿真研究[J].系統仿真學報,2001,13(3):368-369.[6] 翟宇毅,馬金明,姚志良。超小型潛水機器人沉浮系統設計[J].光學精密工程,2004,12(3):231-234.[7] 周立功.AMR嵌入式系統基礎教程[M].北京:北京航空航天大學,2005.作者簡介:周麗麗(1983-),在讀博士,助理研究員,研究方向:機器視覺與安全分析。








評論