基于LMI的無人直升機姿態解耦魯棒控制器設計

1 引言
本文引用地址:http://www.104case.com/article/201808/386704.htm目前,隨著國民經濟的迅速發展,微型無人直升機在越來越多的領域得到應用,例如在消防、電力線纜巡檢、反恐、救災等場合都已經出現了微型無人直升機的身影[1]。但是微型無人直升機具有不穩定、強耦合、不確定、易進入渦環狀態、操縱功效和抗風能力差的特點,這就導致無人直升機控制難度大,并對飛行控制系統的各種性能均提出嚴峻考驗。另外,隨著進一步的戰事和民用的需求,未來的無人直升機將在極為惡劣的環境下完成復雜的戰術和戰略使命,并且還需要能夠實現精確的自動著陸以及故障狀態下的容錯、自修復控制等,這些都對無人直升機的飛行控制系統提出了極為苛刻的要求。采用傳統基于PID的單回路控制器設計方法顯然已無法滿足高性能無人直升機控制系統的設計要求,因此,進一步加強對無人直升機的先進飛行控制理論和方法的研究,對促進我國無人直升機先進飛行控制技術發展具有重要理論和現實意義。
本論文旨在對面向無人直升機的先進自主飛行控制算法進行研究,為自動飛行控制器的后續設計工作提供指導。基于上述現實原因,本論文的研究內容不僅具有顯著的理論和現實意義而且是一個前沿的研究領域[2]。
2 無人直升機動力學模型
2.1 操縱力學結構
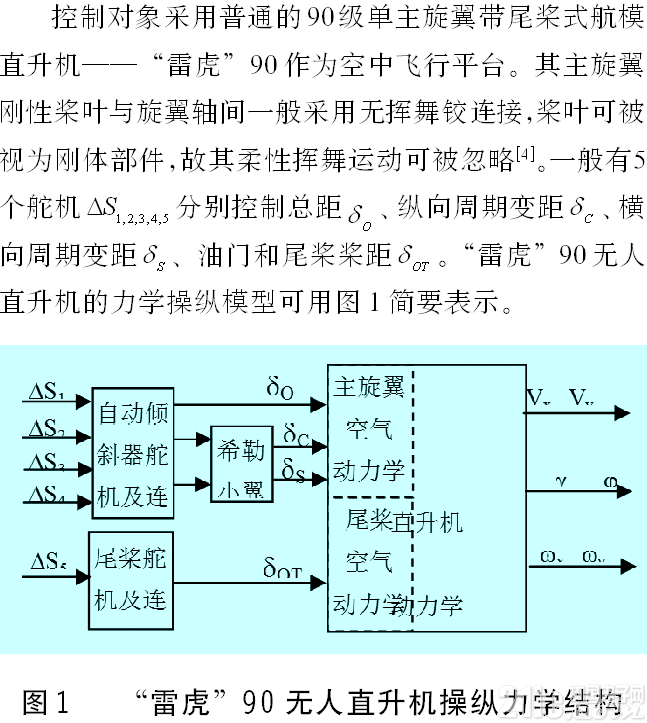
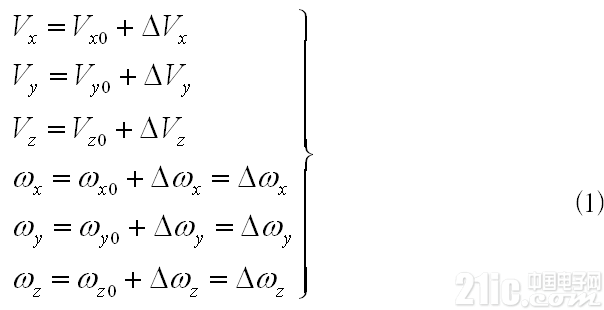
2.2 動力學模型
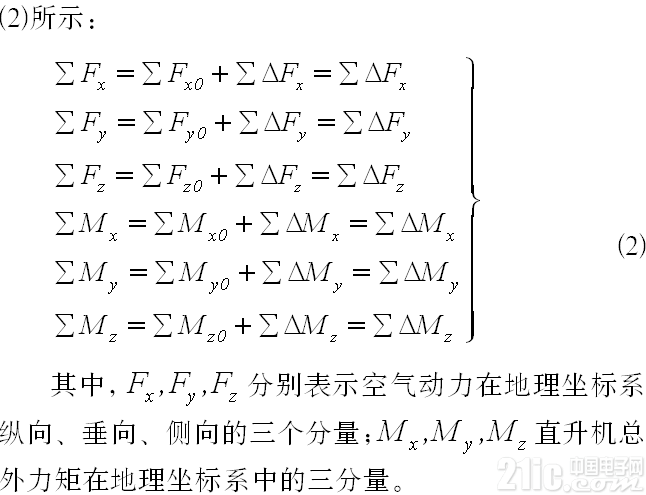
將(1)(2)所描述的參數關系分別帶入到直升機受力分析模型[3]之中,并忽略所有的二階小量,即進行線性化后可以得到下列結果:
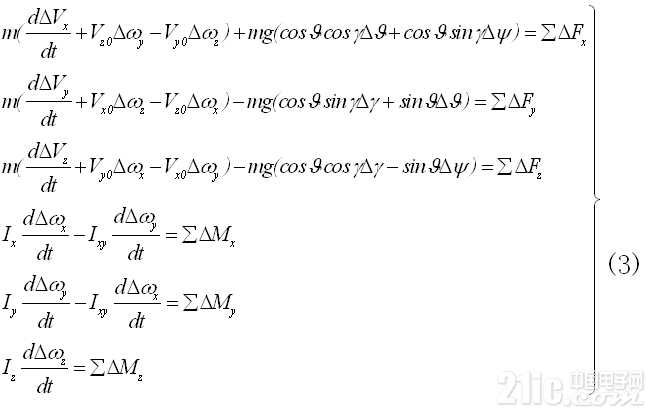
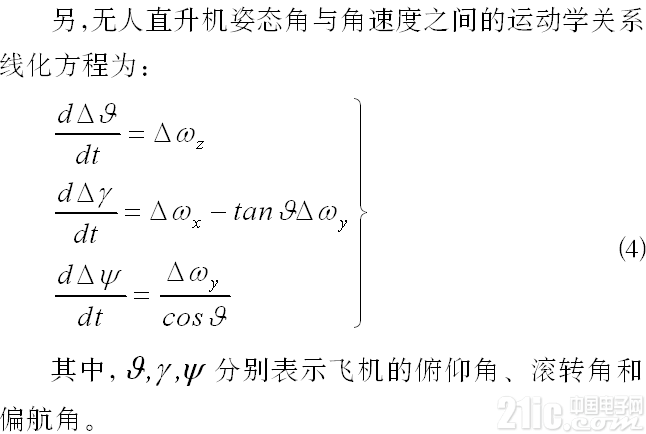
綜合式(3)(4)可以得到直升機定常直線飛行時的9階小擾動線化運動方程的標稱狀態空間表達式:
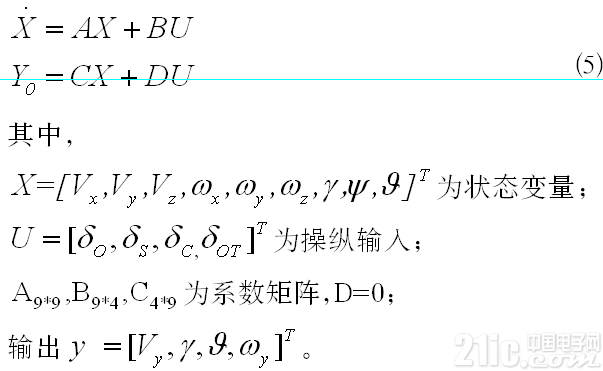
3 基于狀態反饋的極點配置解耦
3.1 狀態反饋解耦控制算法
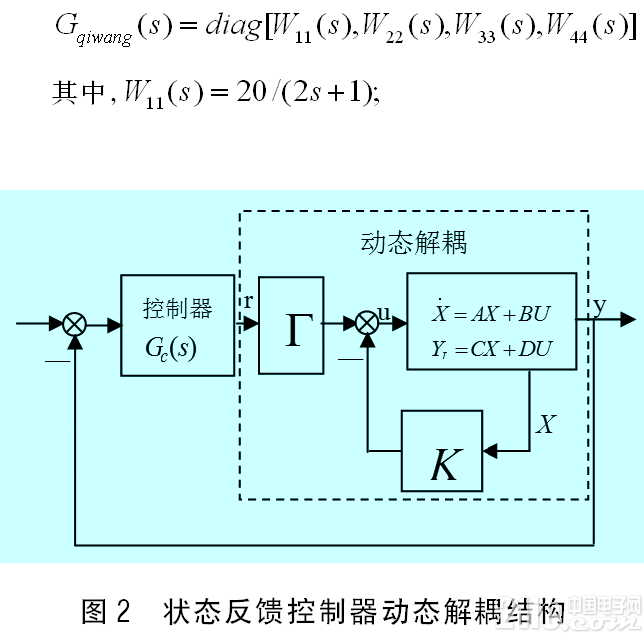
3.2 期望回路形狀
根據ADS—33E—PRF標準,以LEVEL1為設計目標,可以選擇四個通道上期望回路形狀為[5]:









評論