反激開關電源架構與電子電路設計盤點

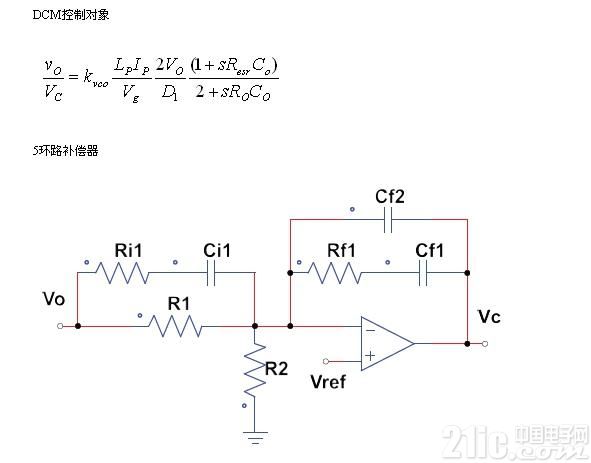
利用電路平均法可推導出控制對象傳遞函數:
DCM控制對象
6SSR與PSR穩定性對比
SSR由于環路補償器外置,且采樣環節工作在線性區,可通過FRA法,準確得到開環傳遞函數Bode圖;
PSR由于環路控制器集成,且反饋回路工作在強非線性區(脈沖采樣變壓器輔助繞組,估算輸出電壓),FRA法不再適用。
SSR控制對象只有90度相移(忽略高頻右半平面零點),但疊加環路補償器的純積分的90度相移,存在不穩定可能(-180度),需靠合理設計零點來提升相位裕量和增益裕量;
PSR環路補償器由于沒有純積分,開環傳遞函數達不到180度相移,不存在環路上的不穩定情況(假定芯片內置極點合理)。
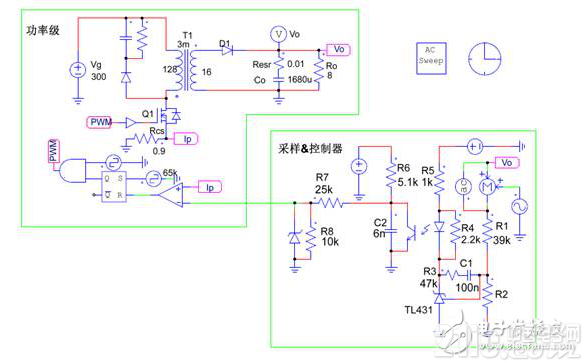
環路分析實例
以AP8267為例,電源工作在PWM模式,簡化等效電路模型,如下圖,可推導出各個環節的傳遞函數。

總結:理論分析和FRA仿真結果完全一致:直流增益相同,均有30dB(10Hz);穿越頻率接近:在600Hz的相移均為80度;在高頻10k處,均衰減-20dB。
開環傳遞函數對比
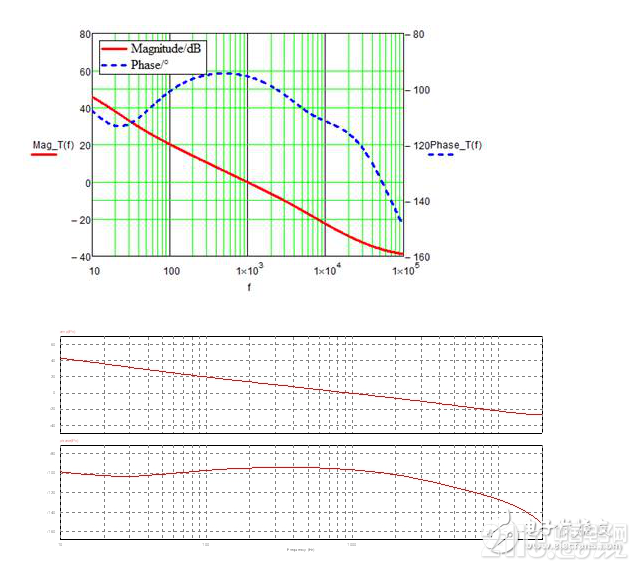
總結:理論分析和FRA仿真結果完全一致: 直流增益相同,均有45dB(10Hz),可實現無靜差控制;穿越頻率在1kHz附近,相位裕量有90度,裕量充足;在高頻10k處,均衰減-20dB以上,抗干擾性強。













評論