基于ARM處理器的吸塵機器人硬件設計是什么樣的?

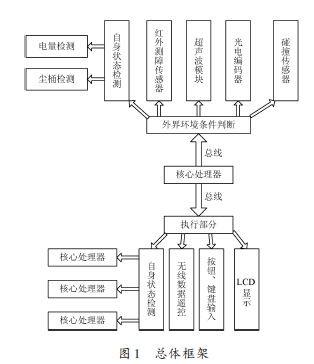
接收頭如果接收到38 kHz的紅外脈沖就會返回輸出低電平,否則就會輸出高電平。通過對I/O口的檢測,便可以判斷物體的有無。這樣一共可以檢測14個方向,覆蓋360°范圍。機器人對前后的近距離障礙物都能檢測,前進后退都能工作,這種由2個紅外接收管組成測障傳感器有效距離接近2 m,并且還能夠在球非常近的范圍內(10 cm內)讀取障礙物距離結果(沒有溢出)。
本文引用地址:http://www.104case.com/article/201808/385805.htm在機器人的左前、左后、右前、右后4個方位安裝四個碰撞開關(常開),通過采集模擬口上電壓值的變化,判斷出其中的一個或幾個碰撞開關閉合,從而檢測出哪個方向有碰撞發生。
2.4 人機交互模塊
(1)液晶顯示和鍵盤輸入:兩者配合使用可以設置機器人各種參數,如自主啟動、設置工作時間等。
(2)無線遙控模塊:紅外遙控使機器人的使用更加方便簡單,發射距離超過10m,能滿足需要。
3 結語
通過這樣的硬件設計,清潔機器人控制系統,既能滿足良好的實用性,還降低了成本,工作穩定可靠。機器人傳感器模塊能精確定位障礙物,通過軟件策略能實現良好的避障。對將來家用服務機器人的研究與開發有著重要現實意義。



評論