如何基于RS485研究總線集散式測控系統(tǒng)?

1引言
本文引用地址:http://www.104case.com/article/201808/385590.htmRS-485由電子工業(yè)協(xié)EIA(Electronics?Industry?Association)于1983年制定。它具有了多點、雙向通信能力,即允許多個發(fā)送器連接到同一條總線上,同時增加了發(fā)送器的驅動能力和沖突保護特性,擴展了總線共模范圍,后命名為TIA/EIA-485-A標準。
RS-485采用平衡發(fā)送和差分接收,具有抑制共模干擾的能力。其傳輸時的電氣協(xié)議規(guī)定:當A線的電壓低于B線時,傳送的是信號1,當A線的電壓高于B線時,傳送的是信號0。A線和B線能承受的共模信號為 -7V~+12V,這里講的共模信號是指A線或B線對地的電壓。一個標準發(fā)送器能夠直接驅動幾個接收器,且發(fā)送器可以被關閉使其輸出端變成高阻,因此只需 2條連線既可實現(xiàn)一個半雙工的通信網(wǎng)絡。RS-485標準只對接口的電氣特性做出規(guī)定,而不涉及接插件、電纜或協(xié)議,在此基礎上用戶可以建立自己的高層通信協(xié)議。
2硬件電路和通信時序
由RS-485組成單主機-多從機的集散式控制系統(tǒng)的簡圖如圖1所示。
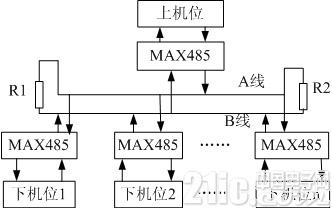
圖1RS-485總線的結構圖
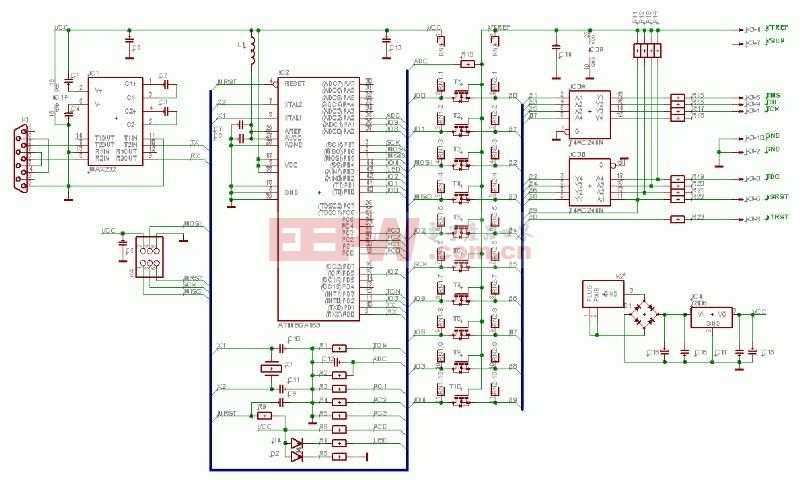
對于單片機異步通信,除了直接連接TX和RX端外,不同于RS-232通信協(xié)議,RS-485一定要用單片機的一個I/O引腳負責數(shù)據(jù)接收或發(fā)送方向的控制。用RS-485協(xié)議組成的主從通信方式中,所有的通信由一個主機掌控,其它所有從機平時處于接收模式,一旦某一個從機被主機呼叫,就將其通信狀態(tài)改成為發(fā)送模式,待數(shù)據(jù)發(fā)送完畢后又轉為接收模式。系統(tǒng)硬件連接電路原理圖如圖2所示。
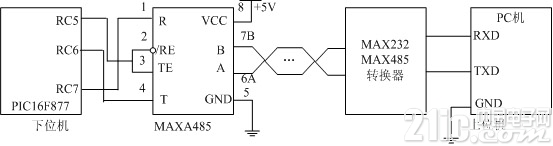
圖2系統(tǒng)硬件連接原理圖
2.1上位機主控端
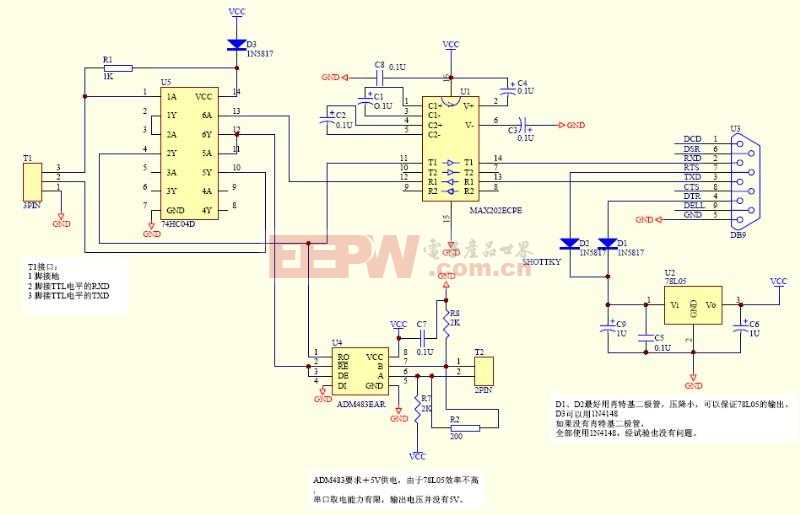
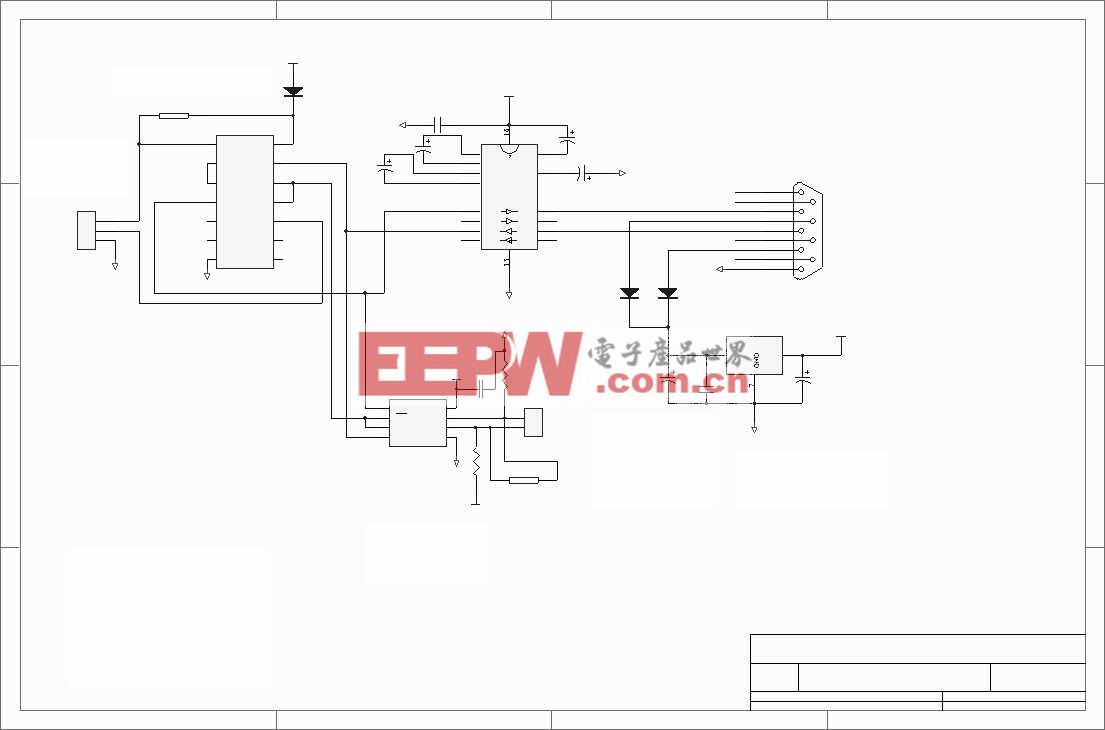
由于上位機上只有傳統(tǒng)的9針D型串口,要和多個下位機節(jié)點組成數(shù)據(jù)通信網(wǎng)絡,需要將RS-232通信協(xié)議轉換,RS-485協(xié)議方式,需要用到MAX232和MAX485芯片各一塊,其電路原理圖如圖3所示。
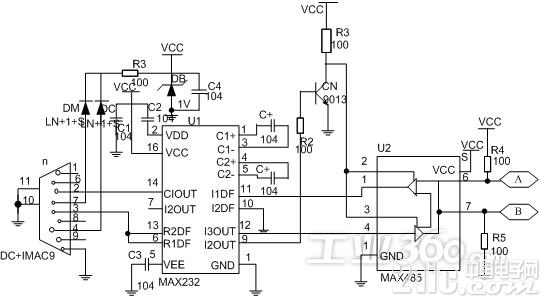
圖3RS-232到RS-485的電平轉換圖
RS-232-485轉換器主要包括了電源、RS-232電平轉換、RS-485電平轉換三部分。該電路的RS-232電平轉換電路使用了市場上常見的MAX232集成電路,RS-485電平轉換電路采用了MAX485集成電路。為了使用方便,電源部分設計成無源方式,整個電路的供電直接從PC機的RS232接口中的DTR(4腳)和RTS(7腳)取出。PC串口每根線可以提供大約9mA的電流,因此兩根線提供的電流就足夠供給本電路使用。經(jīng)實驗,本電路只使用其中一條線也能夠正常工作。使用本電路需注意PC程序必須使串口的DTR和RTS輸出高電平,經(jīng)過D3穩(wěn)壓后得到VCC,經(jīng)過實際測試,VCC電壓大約在4.7V左右。因此,電路中要說D3起的作用是穩(wěn)壓和限壓功能。
MAX485是通過兩個引腳RE(2腳)和DE(3腳)來控制數(shù)據(jù)的輸入和輸出。當RE為低電平時,MAX485 數(shù)據(jù)輸入有效;當DE為高電平時,MAX485數(shù)據(jù)輸出有效。在半雙工使用中,通常可以將這兩個腳直接相連,然后由PC或者單片機輸出的高低電平就可以讓 MAX485在接收和發(fā)送狀態(tài)之間轉換了。由于本電路DTR和RTS都用于了電路供電,因此使用TX線和MAX232的另外一個通道及Ql來控制 MAX485的狀態(tài)切換。平時MAX232的9腳輸出高電平,經(jīng)Ql倒相后,使MAX485的RE和DE為低電平而處于數(shù)據(jù)接收狀態(tài)。當PC機發(fā)送數(shù)據(jù)時,MAX232的9腳輸出低電平,經(jīng)Ql倒相后,使MAX485的RE和DE為高電平而處于數(shù)據(jù)發(fā)送狀態(tài)。
2.2下位機從動端
PIC16F877單片機具有一個通用同步異步接收發(fā)送器USART,又名串行通訊接口(SCI),可工作于全雙工異步工作模式和半雙工同步工作模式,它是一種利用PORTC口的RC6和RC7兩個引腳作為通訊的兩線制串行通訊接口。為了把PORTC口的RC6和RC7兩個引腳分別設置成串行通訊接口的發(fā)送(TX)腳和接收(RX)腳,必須要把USART的接收狀態(tài)和控制寄存器TCSTA的bit7(SPEN)位和TRISC寄存器的bit7置1,把TRISC寄存器的bit6置0。為了使USART分別工作于接收或發(fā)送狀態(tài),就必須設置相應的狀態(tài)寄存器和控制寄存器。
USART發(fā)送器和接收器在功能上是完全獨立的,要使USART工作在異步通訊方式,它們所用的數(shù)據(jù)格式和波特率就必須是相同的。這里使用常用的格式:波特率9600,無校驗,8個數(shù)據(jù)位,1個停止位。
在編寫程序時首先要設置好USART異步通訊模塊工作模式及相關寄存器,主要有以下模塊寄存器:TXSTA(數(shù)據(jù)發(fā)送控制及狀態(tài)寄存器),RCSTA(數(shù)據(jù)接收控制及狀態(tài)寄存器),SPBRG(波特率控制寄存器),INTCON、PIEI、PIRI(相關的中斷控制寄存器),TXREG(串行數(shù)據(jù)發(fā)送寄存器),TCTEG(串行數(shù)據(jù)接收寄存器)。
在PIC單片機中,決定USART通信波特率高低的,只有SPBRG寄存器和TXSTA寄存器中的BGRH位,不占用任何其它定時器資源。波特率發(fā)生器的工作時鐘取自于單片機主振蕩器的振蕩頻率輸出,通過設置SPBRG寄存器和BGRH控制位對振蕩頻率分頻,最后產(chǎn)生所需的波特率值。
當BRGH=0時,為低速波特率發(fā)生方式;BRGH=1則產(chǎn)生高速波特率。這里使用高速波特率,因為這樣可以減少與標準波特率值的誤差。異步通信告訴波特率的計算方法如下:若單片機的工作振蕩頻率為fosc,,SPBRG寄存器值為X,則高速波特率的計算公式為:
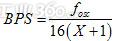
(1)
在設計過程中,我們一般是先選定需要得到的波特率,然后計算SPBRG的設定值X,變換式(1),即得:
(2)
異步通信波特率設定時得注意事項:當選用標準波特率時,如果一味追求一步通信時波特率的準確度,那就應該選擇11.0592MHz作為單片機的工作振蕩頻率。但其實大可不必如此計較。異步通信允許波特率存在一定的偏差,只要偏差值在士3%之內就可以保證正常通信,所以對于常用的1200bps~9600bps波特率的設定,可選的振蕩頻率可以有很多種,用戶完全可以根據(jù)自己所設計系統(tǒng)的其他功能要求而兼顧選擇振蕩頻率。使得單片機的振蕩頻率越低,功耗就越小,系統(tǒng)抗干擾能力也越強。另外,對于所選的波特率如果既可以用低速方式又可以用高速方式時,在程序中應盡量選擇高速方式,這樣得到的實際波特率誤差相對較小。




評論