一種提高步進(jìn)電機(jī)運(yùn)行質(zhì)量的電流控制方法

這種自適應(yīng)衰減模式與只使用慢衰減模式相比,平均電流的變化比較小。由于快速衰減模式只用來(lái)控制驅(qū)動(dòng)電流低于設(shè)定值,誤差比在整個(gè)PWM關(guān)斷時(shí)間采用快衰減模式要小的多。
這種控制方法的優(yōu)點(diǎn)是,對(duì)于不同的電機(jī)和電源電壓,用戶不需要做任何系統(tǒng)調(diào)整,衰減模式是完全自動(dòng)調(diào)整的。 而傳統(tǒng)的步進(jìn)電機(jī)驅(qū)動(dòng),對(duì)于不同應(yīng)用,必須調(diào)整衰減模式甚至PWM關(guān)斷時(shí)間,以得到最好的運(yùn)行質(zhì)量。
使用了這種電流調(diào)節(jié)方法,MP6500可以確保整個(gè)周期的平均繞組電流都準(zhǔn)確穩(wěn)定(見(jiàn)圖8),明顯改善了電機(jī)的運(yùn)行質(zhì)量。
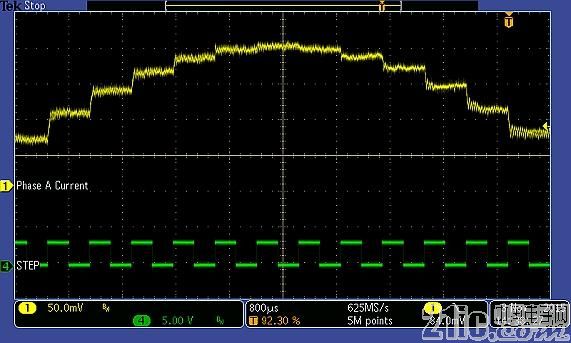
圖8:MP6500輸出電流波形
電機(jī)運(yùn)行質(zhì)量測(cè)量
步進(jìn)電機(jī)的運(yùn)行質(zhì)量,往往很難準(zhǔn)確的量化評(píng)估。通常,靠人的眼睛,耳朵,手來(lái)判斷相對(duì)位置,噪聲和振動(dòng)的情況。這些方法都很難精確測(cè)量每個(gè)細(xì)分段的位置精度。一個(gè)步距角1.8°步進(jìn)電機(jī),每八分之一步對(duì)應(yīng)的旋轉(zhuǎn)角度為0.225°,非常小。 在電機(jī)運(yùn)動(dòng)時(shí),比較容易的測(cè)試方法是時(shí)域測(cè)量, 定位誤差會(huì)轉(zhuǎn)化為速度的變化。速度隨時(shí)間的變化可以用示波器測(cè)量出來(lái)。為了實(shí)現(xiàn)這些測(cè)量,測(cè)試設(shè)備需要一個(gè)高分辨率的光學(xué)編碼器和與步進(jìn)電機(jī)支架組裝在一起的磁粉制動(dòng)器。
步進(jìn)電機(jī)選用的是一個(gè)用于小型工業(yè)設(shè)備或3D打印機(jī)的XY位移平臺(tái)的典型電機(jī):1.8°步距角NEMA 23步進(jìn)電機(jī),電感量為2.5mh,額定電流2.8A。
要進(jìn)行運(yùn)行質(zhì)量測(cè)量,還需要一個(gè)頻率電壓轉(zhuǎn)換器(Coco Research KAZ-723)去處理光電編碼器的輸出信號(hào),轉(zhuǎn)化為電壓信號(hào)后就可以在示波器和頻譜分析儀上分析處理。這個(gè)電壓信號(hào)實(shí)時(shí)代表了不斷更新的電機(jī)轉(zhuǎn)速。
測(cè)試設(shè)備如圖9,圖10所示。

圖9:電機(jī)試驗(yàn)臺(tái)。

圖10:kaz-723 頻率電壓轉(zhuǎn)換器。
為了檢測(cè)整個(gè)測(cè)試系統(tǒng)的運(yùn)行和了解所用電機(jī)和測(cè)試裝置的固有缺陷,在電機(jī)兩個(gè)線圈上加上相位差90度的正弦波電流。兩相電流和代表電機(jī)轉(zhuǎn)速的電壓信號(hào),如圖11所示。
頻率電壓轉(zhuǎn)換器的輸出顯示電機(jī)瞬時(shí)速度的變化是周期性的,與驅(qū)動(dòng)電流波形同步。這個(gè)速度變化很可能是由于電機(jī)本身的磁場(chǎng)和機(jī)械構(gòu)造的缺陷引起的,也部分原因可能是編碼器,測(cè)試機(jī)架,或驅(qū)動(dòng)電流的諧波失真分量。
那么,圖11就是此測(cè)試設(shè)置下此電機(jī)最理想的運(yùn)行結(jié)果,雖然我們可以通過(guò)預(yù)調(diào)整驅(qū)動(dòng)波形來(lái)補(bǔ)償電機(jī)結(jié)構(gòu)引起的問(wèn)題以進(jìn)一步提高運(yùn)行質(zhì)量。
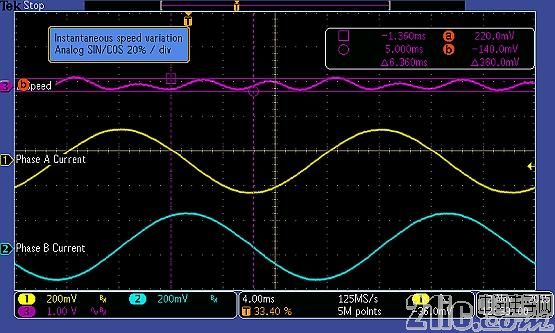
圖11:模擬電流驅(qū)動(dòng)電機(jī)運(yùn)行測(cè)量。
接著,在相同設(shè)置和試驗(yàn)條件下,用市面上通用的雙極步進(jìn)驅(qū)動(dòng)器來(lái)驅(qū)動(dòng)電機(jī),采用傳統(tǒng)的峰值電流控制和使用外部檢測(cè)電阻器。該驅(qū)動(dòng)器電流增大時(shí)采用慢衰減模式,電流減小采用混合衰減模式。
混合衰減模式的閾值設(shè)置盡量?jī)?yōu)化,使得慢衰模式工作時(shí)間盡可能長(zhǎng),同時(shí)當(dāng)電流幅值減小到零時(shí)能一直保證跟蹤所期望的理想波形。這樣可以盡可能的減小PWM電流紋波,也就是盡量減小速度的變化量。
如圖12所示,采用這種傳統(tǒng)步進(jìn)驅(qū)動(dòng)芯片,速度的變化是模擬正弦和余弦波電流驅(qū)動(dòng)的三倍。這意味著電機(jī)噪聲,振動(dòng),以及定位誤差都增加了。
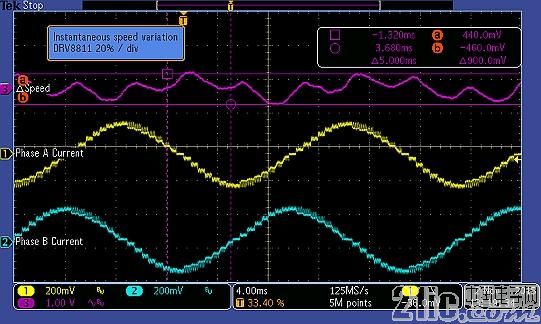
圖12:傳統(tǒng)控制調(diào)節(jié)方案下的電機(jī)運(yùn)行質(zhì)量。
MPS MP6500步進(jìn)驅(qū)動(dòng)集成芯片,采用內(nèi)部電流采樣和上述的自動(dòng)衰減電流調(diào)節(jié)方案,可以實(shí)現(xiàn)更好的電機(jī)運(yùn)行質(zhì)量。如圖13所示,速度變化雖不是和模擬正弦和余弦波電流驅(qū)動(dòng)的結(jié)果一樣小,但是比傳統(tǒng)的驅(qū)動(dòng)方案要改善許多,使得電機(jī)運(yùn)行更平穩(wěn)安靜,定位更精確。
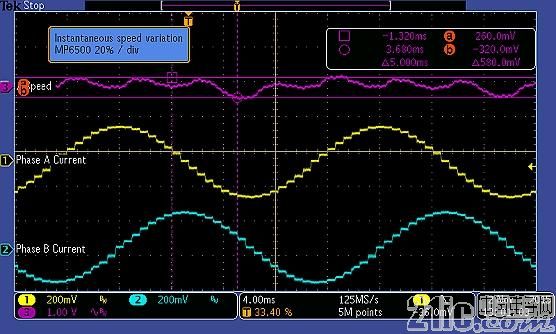
圖13:MP6500驅(qū)動(dòng)的電機(jī)運(yùn)行質(zhì)量
高速運(yùn)行
正如我們?cè)趫D3中看到的,在很高的步率情況下,傳統(tǒng)的電流控制技術(shù)不能很好控制繞組電流,有可能產(chǎn)生嚴(yán)重的電流波形畸變。隨著電機(jī)的轉(zhuǎn)速不斷增大,反電動(dòng)勢(shì)會(huì)越來(lái)越大,在它作用下相電流隨速度的增大而減小,且電流下降的時(shí)間也減少,從而導(dǎo)致力矩變小甚至失速。相對(duì)于傳統(tǒng)方案,MP6500的改進(jìn)自適應(yīng)電流控制模式可以使電機(jī)運(yùn)行在更高的速度。
圖14為,同上測(cè)試系統(tǒng)下采用傳統(tǒng)電流控制模式,電機(jī)轉(zhuǎn)速不斷提高的測(cè)試結(jié)果(橫軸為時(shí)間,縱軸為轉(zhuǎn)速)。失速發(fā)生時(shí),速度測(cè)量結(jié)果是在8V左右,相當(dāng)于在480RPM。
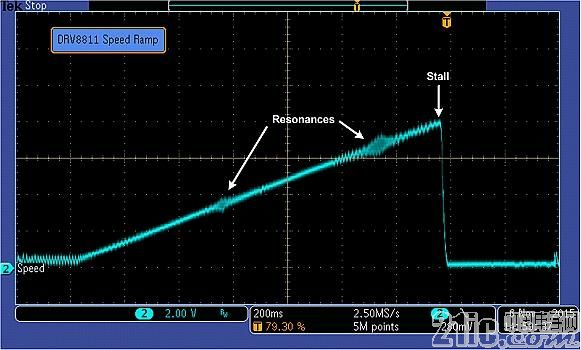
圖14:傳統(tǒng)控制模式的提速測(cè)試。
使用相同的設(shè)置和繞組電流,如圖15所示,由于更好的自適應(yīng)電流調(diào)節(jié)控制方案,MP6500可以驅(qū)動(dòng)明顯更高的速度。失速發(fā)生時(shí),速度測(cè)量結(jié)果是在10V左右,相當(dāng)于在600RPM。
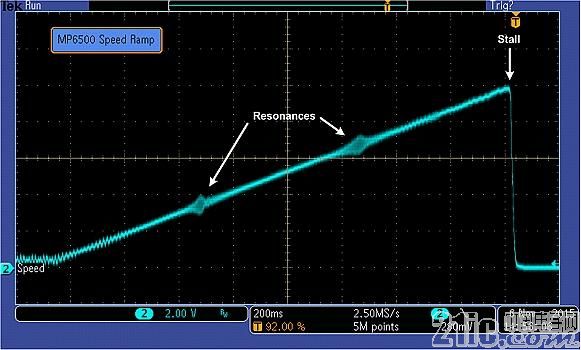
圖15:MP6500的提速測(cè)試。
結(jié)論
相對(duì)于傳統(tǒng)的步進(jìn)電機(jī)的驅(qū)動(dòng)芯片,MP6500采用了先進(jìn)的自適應(yīng)電流控制方案,在保證總系統(tǒng)成本不變或更低的情況下,能明顯改善步進(jìn)電機(jī)的運(yùn)行質(zhì)量。應(yīng)用本文中描述的測(cè)試設(shè)備,我們可以定量的測(cè)試和驗(yàn)證此方案下運(yùn)行質(zhì)量的改進(jìn)與提高。













評(píng)論