深度“解剖”神秘的德州儀器DLP NIRscan Nano模塊

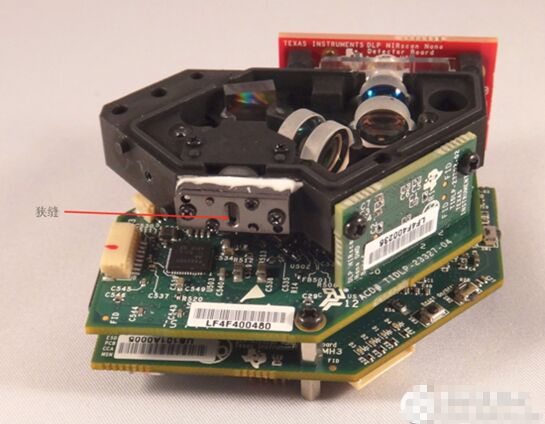
為了將DLP NIRscan Nano評(píng)估模塊(EVM)的硬件及光引擎解釋清楚,網(wǎng)友拆解了一個(gè)早期由Coretronic公司生產(chǎn)的模塊。需要注意的是,任何對(duì)光引擎的拆解會(huì)使NIRscan Nano EVM的保修失效。另外,去掉光引擎上的罩子會(huì)使灰塵和污垢聚集在光學(xué)器件上,從而影響到系統(tǒng)性能。此外,去掉上面的罩子會(huì)移動(dòng)光學(xué)器件、狹縫和探測(cè)器,使這些元件錯(cuò)位,需要廠家重新進(jìn)行對(duì)準(zhǔn)和校準(zhǔn)。如果拆除了狹縫,將需要把InGaAs探測(cè)器和DLP2010NIR返廠進(jìn)行系統(tǒng)對(duì)準(zhǔn)與校準(zhǔn)。
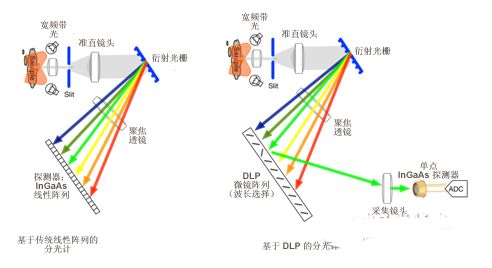
本文引用地址:http://www.104case.com/article/201808/384886.htm我們先來(lái)快速瀏覽一下。如下圖所示,基于DLP的分光計(jì)利用數(shù)字微鏡器件 (DMD)和單點(diǎn)探測(cè)器取代了傳統(tǒng)線性陣列探測(cè)器。通過(guò)按順序打開(kāi)與特定波長(zhǎng)光相對(duì)應(yīng)的一組鏡列,對(duì)應(yīng)光線被指向探測(cè)器,并被捕獲。通過(guò)掃描DMD上的一組鏡列,可以計(jì)算出吸收光譜。要獲得與DLP分光計(jì)實(shí)現(xiàn)方式相關(guān)的更多細(xì)節(jié),請(qǐng)參考DLP分光計(jì)設(shè)計(jì)注意事項(xiàng) 。
近紅外 (NIR) 光譜光譜分析中的DLP技術(shù)提供以下優(yōu)勢(shì):
與具有極小像素的線性陣列探測(cè)器相比,通過(guò)使用更大的單點(diǎn)1mm探測(cè)器,它能實(shí)現(xiàn)更高性能。
通過(guò)使用單元探測(cè)器和低成本光學(xué)器件,它能實(shí)現(xiàn)更低的系統(tǒng)成本。高分辨率DMD使得定制圖形能夠補(bǔ)償每一個(gè)單獨(dú)系統(tǒng)的光學(xué)失真。
能夠捕獲更大信號(hào)不僅得益于相比傳統(tǒng)技術(shù),DMD具有更大的光學(xué)擴(kuò)展量(etendue),而且也受益于其快速、靈活、以及可編程的顯示模式及濾波器設(shè)計(jì)。
借助可編程顯示模式,DLP分光計(jì)能夠:
通過(guò)控制一個(gè)鏡列中的像素?cái)?shù)量來(lái)改變到達(dá)探測(cè)器的光的強(qiáng)度。
通過(guò)控制鏡列的寬度來(lái)改變系統(tǒng)的分辨率。
使用一組Hadamard圖形來(lái)在一個(gè)模式內(nèi)捕捉多個(gè)波長(zhǎng)的光。然后,單獨(dú)的波長(zhǎng)數(shù)據(jù)可通過(guò)解碼獲取。每個(gè)模式內(nèi)打開(kāi)DMD像素?cái)?shù)量的50%,將比上面提到的列掃描方式獲得更強(qiáng)信號(hào)引至探測(cè)器/
使用定制光譜濾波器來(lái)選擇需要的特定波長(zhǎng)。
當(dāng)前,DLP NIRscan Nano軟件支持可變分辨率和Hadamard圖形。不支持可變強(qiáng)度和定制光譜濾波器。光譜濾波器的示例請(qǐng)見(jiàn)SPI論文:由Eric Pruett撰寫(xiě)的德州儀器 (TI) DLP近紅外分光計(jì)的最新開(kāi)發(fā)實(shí)現(xiàn)了下一代嵌入式小巧、便攜式系統(tǒng)。
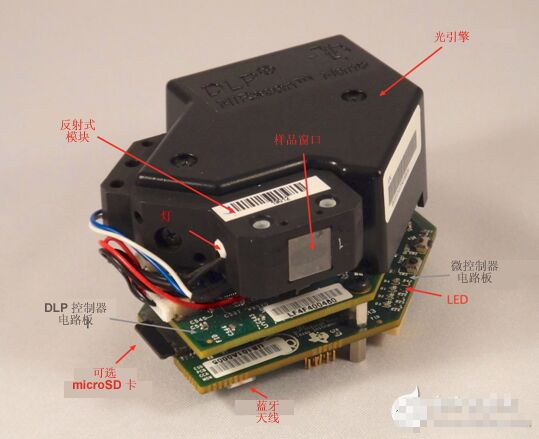
DLP NIRscan Nano具有以下主要組件:
拿掉光引擎的罩子后,可以看到受其保護(hù)的DMD和探測(cè)器電路板。
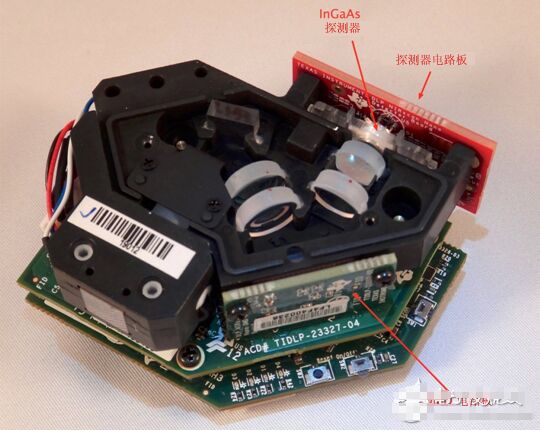
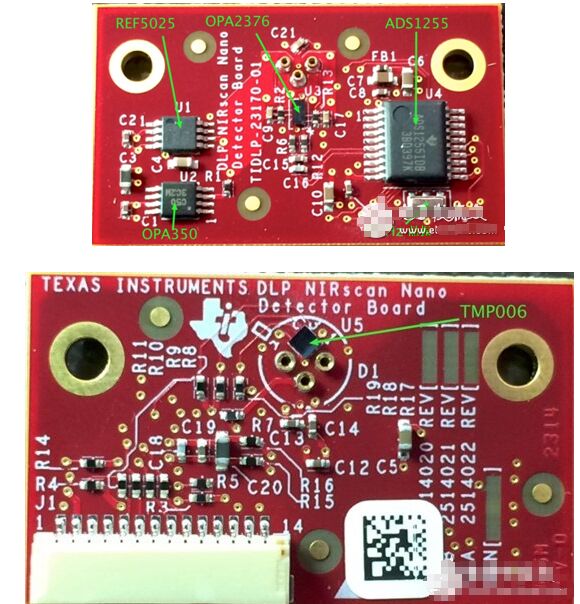
探測(cè)器電路板包含以下主要組件
1mm非冷卻Hamamatsu G12180-010A InGaAs光電二極管(探測(cè)器)。
OPA2376轉(zhuǎn)阻低噪聲放大器:將InGaAs探測(cè)器到ADC的信號(hào)放大。
ADS1255 ADC:將InGaAs探測(cè)器的已放大信號(hào)轉(zhuǎn)換為用于TIva處理的24位值。
TMP006熱電偶傳感器:測(cè)量InGaAs探測(cè)器系統(tǒng)的環(huán)境溫度。這些值在每次掃描時(shí)被捕獲。
REF5025:低噪聲、極低漂移、高精度電壓基準(zhǔn),它為轉(zhuǎn)阻放大器和ADC提供2.5V基準(zhǔn)。
OPA350:對(duì)轉(zhuǎn)阻放大器的2.5V基準(zhǔn)電壓進(jìn)行緩沖的高速運(yùn)行放大器。
裝上探測(cè)器后:

去掉反射式模塊,可以看到狹縫:
DMD電路板正好將DLP2010NIR與系統(tǒng)的其余部分相連。

一旦將光引擎的罩子拿掉,你就能夠看到以下的光學(xué)組件。準(zhǔn)直鏡頭和波通濾波器在前兩張照片中所示的金屬薄片的下方。為了讓你看到系統(tǒng)的全部光學(xué)器件,我已經(jīng)將這個(gè)金屬薄片拆除。
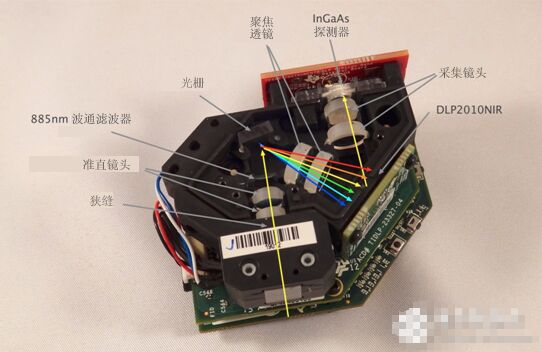
在這幅圖中,我已經(jīng)在來(lái)自樣品的輸入反射光上添加了標(biāo)記(黃色箭頭)。漫反射自樣品的光在采集鏡頭上聚集,并且通過(guò)輸入狹縫聚焦在光引擎上。狹縫的大小設(shè)定平衡了波長(zhǎng)分辨率以及分光計(jì)信噪比的考量這個(gè)分光計(jì)使用寬度為25μm、長(zhǎng)度為1.69mm的狹縫。通過(guò)狹縫的光在第一組鏡頭上校準(zhǔn),通過(guò)一個(gè)885nm長(zhǎng)的波通濾波器,然后打在一個(gè)反射光柵上。這個(gè)與聚焦透鏡組合在一起的光柵將光源色散為連續(xù)波長(zhǎng)(多色光線)。聚焦透鏡將狹縫圖像展開(kāi)在DLP2010NIRDMD上。這個(gè)狹縫圖像的不同波長(zhǎng)水平分布在DLP2010NIR DMD上。這個(gè)光學(xué)系統(tǒng)將900nm波長(zhǎng)成像在DMD的一端上,將1700nm波長(zhǎng)成像在另一端上,而在兩端中間按順序散開(kāi)所有其它波長(zhǎng)。
當(dāng)選擇將特定的DMD鏡列打開(kāi)時(shí),或傾斜到+17°位置時(shí),所選鏡列反射回來(lái)的光線在引導(dǎo)下,通過(guò)采集光學(xué)器件,到達(dá)單像素InGaAs探測(cè)器(黃色光線)。所有其它DMD鏡列被設(shè)置為關(guān)閉、或者傾斜至-17°位置上,使未選中的波長(zhǎng)的光線轉(zhuǎn)向光引擎的底部,并遠(yuǎn)離探測(cè)器光路徑,這樣的話,就不會(huì)干擾所選波長(zhǎng)的測(cè)量了。
為了在狹縫位置、光柵角度和DMD 位置上允許機(jī)械公差,DLP NIRscan Nano的狹縫圖像投到DMD上時(shí),在長(zhǎng)度方向上每邊欠覆蓋10%而在高度方向上每邊過(guò)覆蓋10%,這就使DMD上每個(gè)像素列對(duì)應(yīng)約為(1700 - 900nm)/(854 * 0.8像素) = 1.17nm。制造時(shí),在波長(zhǎng)與它們?cè)贒MD上的鏡列位置之間進(jìn)行校準(zhǔn)。由于DMD鏡列的數(shù)量通常不是所需波長(zhǎng)組數(shù)量的整數(shù)倍,DLP NIRscan Nano在整個(gè)掃描期間保持鏡列的寬度不變,按照所需波長(zhǎng)組數(shù)量的步長(zhǎng)在DMD上移動(dòng)。






評(píng)論