如何選用汽車LiDAR的激光器和光電探測器?

光學相控陣(OPA)技術,為第三種競爭掃描式LiDAR技術的方法,因其可靠的“無運動部件”設計而深受歡迎。它由光天線元件陣列組成,這些元件同樣被相干光照亮。通過獨立控制每個元件重新發射光的相位和振幅來實現光波轉向,遠場干擾產生一種理想的照明模式,從單光束到多光束。不幸的是,各種各樣小元件的光損耗限制了其可用范圍。
本文引用地址:http://www.104case.com/article/201712/373269.htmFlash面陣式LiDAR對場景進行光覆蓋,盡管照明區域與探測器視野相匹配。在探測光學焦平面上的APD陣列即為探測器。每個APD均獨立地測量ToF以實現該APD對目標特性成像。這是一種真正的“無運動部件”方法,其中切向分辨率被2D探測器的像素大小所限制。
然而,Flash面陣式LiDAR的主要缺點是光子預算:一旦距離超過幾十米,返回光子的數量就太少,根本無法進行可靠的探測。如果不是對場景進行光覆蓋,以犧牲切向分辨率為代價,用網格點狀結構光來照明,這就可得到改善。垂直腔面發射激光器(VCSELs)使其可在不同方向同時發射成千上萬的光束。
如何不受ToF限制
由于探測電子返回脈沖和帶寬較寬的弱點,ToF LiDAR易受噪聲影響,而閾值觸發可引起測量誤差Δt。基于這些原因,調頻連續波(FMCW)LiDAR是一種有趣的選擇。
在FMCW LiDAR(或chirped 雷達)中,天線連續發射的無線電波頻率是調制的,例如其頻率隨著時間T從f0到 fmax線性增加,然后再隨著時間T從 fmax到f0線性減少。如果反射波從某處的移動物體回到發射點,其瞬時頻率將與發射瞬間的頻率不同。差異來自有兩個方面:一是與物體間的距離,二是其相對徑向速度。因此可通過電子測量頻率差異,并計算物體的距離和速度(見圖3)來確定。
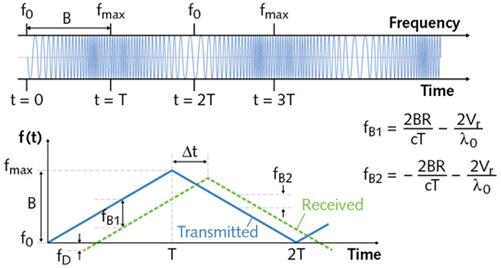
圖3 在chirped 雷達中,通過電子測量 fB1 和fB2 ,可以確定反射物體的距離和它的徑向速度
受到chirped 雷達的啟發,FMCW LiDAR可用不同的方式接近被測物體。在最簡單的設計中,可以對照亮目標的光束強度進行“啁啾chirp”(寬帶線性調頻)調制。該頻率與FMCW雷達的載波頻率遵守相同的規律(如多普勒效應)。反射回來的光被光電探測器檢測到,然后恢復其調制頻率。輸出被放大,并與本機振蕩器混合,以允許測量頻率的變化,同時由此計算出目標的距離和速度。
但是FMCW LiDAR也有其局限性。與ToF LiDAR相比,它需要更強大的計算能力。因此,FMCW LiDAR在生成完整3D環境視圖時,速度要慢一些。此外,測量的精度對啁啾斜線的線性度非常敏感。
盡管設計一套功能完善的LiDAR系統是非常有挑戰性的,但這些挑戰均是可克服的。隨著研究的深入,我們正越來越接近“大部分汽車完成裝配后就可以實現完全自動駕駛”的時代。

評論