集成電壓/電流驅(qū)動的靈活4~20mA環(huán)路供電壓力傳感器變送器

電路功能與優(yōu)勢
本文引用地址:http://www.104case.com/article/201710/369772.htm圖1所示電路是一款魯棒且靈活的環(huán)路供電電流變送器,可將壓力傳感器的差分電壓輸出轉(zhuǎn)換為4 mA至20 mA電流輸出。
該設(shè)計(jì)針對各種橋式電壓或電流驅(qū)動型壓力傳感器而優(yōu)化,僅使用了4個有源器件,總不可調(diào)整誤差低于1%。環(huán)路電源電壓范圍為12 V至36 V。
該電路的輸入具有ESD保護(hù)功能,并且可提供高于供電軌的電壓保護(hù),是工業(yè)應(yīng)用的理想選擇。
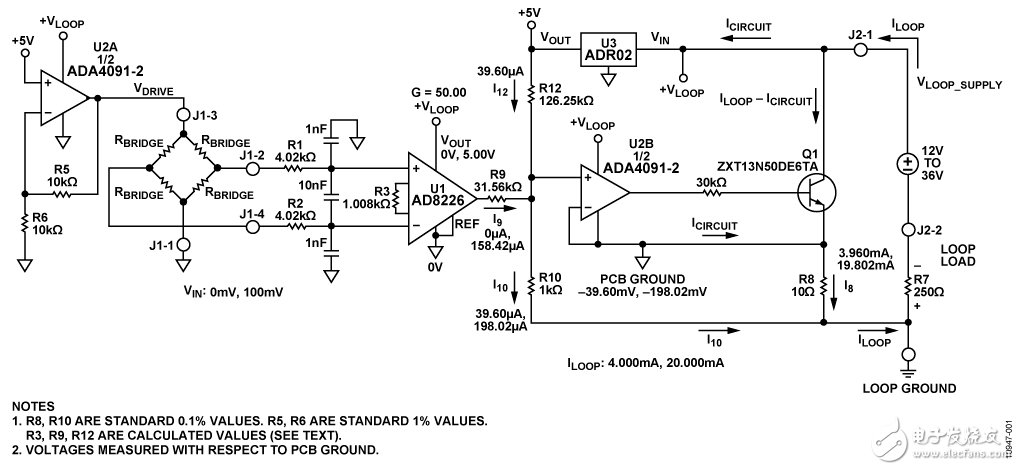
圖1. 魯棒的環(huán)路供電壓力傳感器信號調(diào)理電路,具有4 mA至20 mA輸出
(顯示為傳感器電壓驅(qū)動模式),原理示意圖:未顯示所有連接和去耦
電路描述
該設(shè)計(jì)提供完整的4 mA至20 mA變送器壓力傳感器檢測解決方案,整個電路由環(huán)路供電。有三個重要的電路級:傳感器激勵驅(qū)動、傳感器輸出放大器和電壓-電流轉(zhuǎn)換器。
電路所需總電流為1.82 mA(最大值),如表1所示。因此,可在不超過4 mA最大可用環(huán)路電流的情況下使用電橋驅(qū)動電流高達(dá)2 mA的壓力傳感器。
傳感器激勵驅(qū)動
需使用電壓驅(qū)動或電流驅(qū)動,具體取決于所選壓力傳感器。該電路使用一半的ADA4091-2(U2A),并通過開關(guān)S1選擇不同配置,支持兩種選項(xiàng)之一。開關(guān)S1提供其中一種驅(qū)動選擇。
激勵:電壓驅(qū)動配置
圖2顯示S1的電壓驅(qū)動配置,S1位于PCB上標(biāo)有VOLTAGE DRIVE處(完整電路布局和原理圖參見CN0289設(shè)計(jì)支持包:http://www.analog.com/CN0289-DesignSupport)。
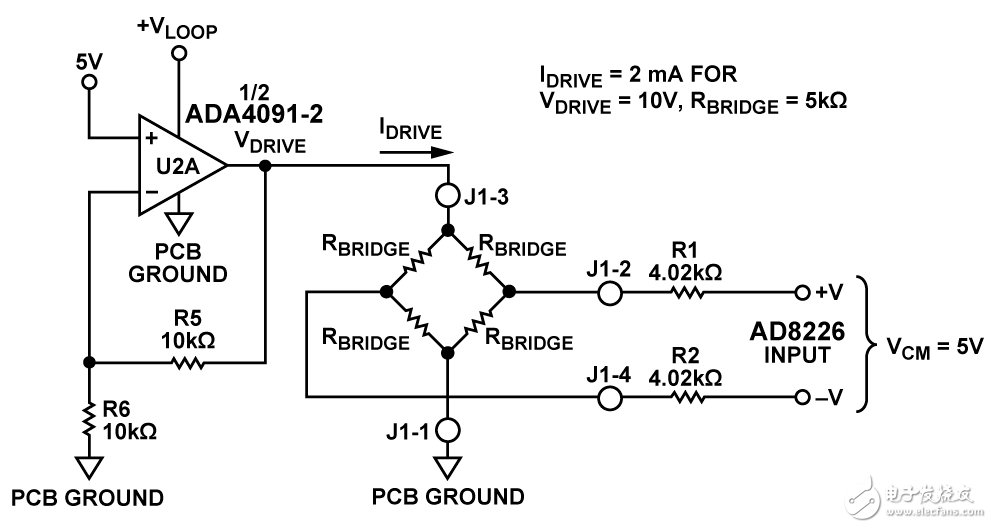
圖2. 傳感器電壓驅(qū)動配置(RBRIDGE=5kΩ、VDRIVE=10V
電壓驅(qū)動電路通常配置為10 V電橋驅(qū)動電壓。在該模式下,允許的最小電橋電阻為:
對于低于5 kΩ的電橋電阻而言,可通過移除R6并使用緩沖器配置,將驅(qū)動電壓降低至5 V。
通過下式選擇合適的R6,便可獲得驅(qū)動電壓的其他值:
其中:

請注意,環(huán)路電壓VLOOP應(yīng)至少比電橋驅(qū)動電壓高0.2 V,以便讓U2A具有足夠的裕量。

激勵:電流驅(qū)動配置
通過將S1移動至PCB上標(biāo)有CURRENT DRIVE的位置,便可將電路切換至圖3所示的電流驅(qū)動配置。
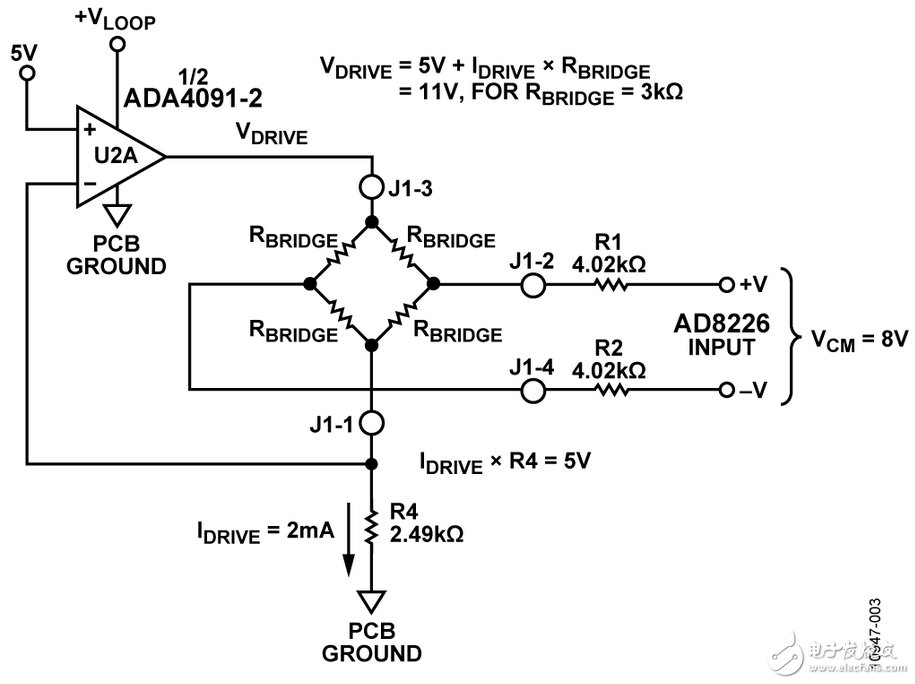
圖3. 傳感器電流驅(qū)動配置(RBRIDGE = 3 kΩ)
在電流驅(qū)動模式中,必須保留最大允許的2 mA電橋驅(qū)動電流。電路配置為R4 = 2.49 kΩ且IDRIVE = 2 mA。使用下式選擇 R4值,可獲得較低的 IDRIVE值:

通過下式可計(jì)算驅(qū)動電壓VDRIVE:

U2A電源需要0.2 V裕量,因此:

在圖3中,RBRIDGE = 3 kΩ、IDRIVE = 2 mA、 VDRIVE = 11 V、VLOOP ≥ 11.2 V。
該電路選擇運(yùn)算放大器ADA4091-2,因?yàn)樗哂械凸模總€放大器250 μA)、低失調(diào)電壓(250 μV)以及軌到軌輸入輸出特性。
電橋輸出儀表放大器以及增益和失調(diào)電阻選擇
電橋輸出采用帶寬為39.6 kHz的共模濾波器(4.02 kΩ、1 nF) 以及帶寬為2 kHz的差模濾波器(8.04 kΩ、10 nF)濾波。
AD8226是理想的儀表放大器選擇,因?yàn)樗哂械驮鲆嬲`差 (0.1%,B級)、低失調(diào)(G = 50時58μV,B級;G = 50時112μV, A級)、出色的增益非線性度(75 ppm = 0.0075%)以及軌到軌輸出特性。
AD8226儀表放大器以系數(shù)50 V至5 V放大100 mV FS信號,增益設(shè)置電阻R3 = 1.008 kΩ。增益G和R3的關(guān)系如下:

其中G = 50,R3 = 1008 Ω。
輸出零值環(huán)路電流ILO = 4 mA:

由于R10與R8之比為100:1

合并最后兩式可得:

ILO= 4 mA時,AD8226輸出為0 V;失調(diào)電阻R12可計(jì)算如下:

若VOUT= 5.00 V,則輸出環(huán)路電流ILH = 20 mA, 因此:


流經(jīng)R12的電流為:

流經(jīng)R9的電流為:

R9值可通過下式計(jì)算:
實(shí)際使用時,R3、R12和R9的計(jì)算值將不作為標(biāo)準(zhǔn)值提供,因此電路所用的實(shí)際值將產(chǎn)生固定誤差。這些誤差可通過下式計(jì)算。
電阻R3、R9和R12產(chǎn)生的增益、失調(diào)和總誤差測量值,以 %FSR表示(其中,F(xiàn)SR = 16 mA):
零電平輸出(4 mA)時的總誤差不受增益誤差影響。
而滿量程輸出(20 mA)時的總誤差可計(jì)算如下:
滿量程誤差 = 增益誤差 + 失調(diào)誤差
實(shí)際電路中,必須選擇最接近EIA標(biāo)準(zhǔn)的0.1%電阻,因此可得前文所述的固定增益和失調(diào)誤差。可使用兩個0.1%電阻組合,以便更接近計(jì)算值。例如,下列0.1%電阻的串聯(lián)組合非常接近計(jì)算值:
R3 = 1 kΩ + 8.06 Ω = 1008.06 Ω (計(jì)算值 = 1008 Ω)
R9 = 30.9 kΩ + 655 Ω = 31.555k Ω (計(jì)算值 = 31.56 kΩ)
R12 = 124 kΩ + 2.26 kΩ = 126.26 Ω (計(jì)算值 = 126.25 Ω)
這些組合的誤差計(jì)算如下:
失調(diào)誤差 = −0.008% FSR
增益誤差 = +0.010% FSR
滿量程誤差 =
然而在某些情況下,電阻供應(yīng)商甚至連標(biāo)準(zhǔn)0.1%電阻值都無法提供,因此需進(jìn)行替換。
例如,EVAL-CN0289-EB1Z 評估板提供的電阻值如下:
R3 = 1000 Ω(計(jì)算值 = 1008 Ω)
R9 = 31.6 kΩ(計(jì)算值 = 31.56 kΩ)
R12 = 124 kΩ(計(jì)算值 = 126.25 kΩ)
根據(jù)評估板提供的數(shù)值,電阻值引起的誤差可計(jì)算如下:
失調(diào)誤差 = +0.45% FSR
增益誤差 = +0.66% FSR
滿量程誤差 = +1.11% FSR
基準(zhǔn)電壓
使用ADR025 V基準(zhǔn)電壓設(shè)置電橋的驅(qū)動電壓或電流,以及設(shè)置4 mA零電平失調(diào)。其初始精度為0.1%(A級)、0.06% (B級),并且具有10 μV p-p電壓噪聲。此外,它將采用高達(dá) 36 V的電源電壓工作,且僅消耗1 mA(最大值),是環(huán)路供電應(yīng)用的理想選擇。
基準(zhǔn)電壓
通過強(qiáng)制數(shù)值大小為信號分量(I9) 和失調(diào)分量(I12)。 之和的電流流過R10,即可產(chǎn)生4 mA至20 mA輸出電流。電流I10 = I9 + I12)在R10兩端產(chǎn)生電壓,該電壓通過U2B和Q1施加于感測電阻R10。流經(jīng)R8的電流是流經(jīng)R10電流的100倍。因此,環(huán)路電流ILOOP可由下式算得:

選擇的R8 (10 Ω)和R10 (1 kΩ)數(shù)值要能夠輕松得到0.1%容差。
為了讓電路正常工作,電路電流I ICIRCUIT
受U2B輸出控制的雙極性NPN晶體管產(chǎn)生環(huán)路電流,并且增益應(yīng)當(dāng)至少為300,以便最大程度減少線性誤差。其擊穿電壓應(yīng)至少為50 V。
輸出晶體管Q1是一個50 V NPN功率晶體管,25°C時功耗為 1.1 W。在20 mA輸出電流輸入至0 Ω環(huán)路負(fù)載電阻且 VCC電源為36 V時,電路具有最差情況下的功耗。這些條件下的 Q1功耗為0.68 W。
驅(qū)動電路板的電源電壓VLOOP取決于環(huán)路電源VLOOP_SUPPLY環(huán)路負(fù)載R7和環(huán)路電流 ILOOP. 這些數(shù)值的關(guān)系如下:

若要使電路正常工作,電源電壓VLOOP必須大于7 V,以便為 ADR02基準(zhǔn)電壓源提供充分的裕量。
因此,

對于20 mA最大環(huán)路電流以及R7 = 250 Ω

最小環(huán)路電源電壓同樣取決于電橋的驅(qū)動電路配置。在VDRIVE= 10 V的電壓驅(qū)動模式下,電源電壓VLOOP必須大于 10.2 V,這樣U2A才能保持足夠的裕量(見圖2)。
在電流驅(qū)動模式下,電源電壓VLOOP必須大于11.2 V,這樣 U2A才能保持足夠的裕量(見圖3)。
環(huán)路電源電壓限值為36 V(最大值)。
有源元件的誤差分析
表2和表3分別表示系統(tǒng)中因有源元件造成的AD8226 和 ADR02的A、B級最大誤差及rss誤差。請注意,運(yùn)算放大器ADA4091-2僅在一種等級水平下可用。


總電路精度
對電阻容差導(dǎo)致的總誤差的合理近似推算是假設(shè)每個關(guān)鍵電阻對總誤差貢獻(xiàn)都相等。5個關(guān)鍵電阻是R3、R8、R9、R10 和R12。0.1%電阻導(dǎo)致的最差情況下的容差可造成0.5%總電阻誤差最大值。若假定rss誤差,則總rss誤差為0.1√5 = 0.224%。
由于有源器件(A級)造成的誤差,需要在之前的最差情況誤差之上增加0.5%的最差情況電阻容差誤差:
失調(diào)誤差 = 0.29% +0.5% = 0.79%
增益誤差 = 0.15% + 0.5% = 0.65%
滿量程誤差 = 0.44% + 0.5% = 0.94%
這些誤差假定選用理想電阻,因此誤差僅來源于其容差。
雖然電路允許具有1%或更低的總誤差,若要求更佳的精度,則電路需具備失調(diào)和增益調(diào)節(jié)能力。針對4 mA輸出和零電平輸入,可通過調(diào)整R12來校準(zhǔn)失調(diào),然后針對滿量程100 mV輸入,通過改變R9調(diào)節(jié)滿量程。這兩項(xiàng)調(diào)節(jié)是相互獨(dú)立的;假定首先進(jìn)行失調(diào)校準(zhǔn)。
電路的實(shí)際誤差數(shù)據(jù)見圖4。總輸出誤差(%FSR)通過將理想輸出電流與測量輸出電流的差除以FSR (16 mA),然后將計(jì)算結(jié)果乘以100即可算出。
請注意,0 mV與1 mV輸入之間的誤差由AD8226輸出級飽和電壓導(dǎo)致,且電路在負(fù)載條件下的誤差范圍為20 mV至 100 mV。所有軌到軌輸出級均受限于其通過飽和電壓(雙極性輸出)或?qū)娮瑁–MOS輸出)達(dá)到供電軌的能力。
若輸出飽和電壓引起的誤差導(dǎo)致某些問題的產(chǎn)生,則來自電橋的輸入信號可通過在+5 V基準(zhǔn)電壓與電橋輸出的其中一側(cè)之間連接一個適當(dāng)?shù)碾娮瓒M(jìn)行偏置。
圖4. 輸出電流(%FSR)的總誤差與電橋輸出的關(guān)系(3 kΩ電橋,24 V環(huán)路電源)








評論