揭秘智能控制云臺主控與驅動電路 —電路圖天天讀(170)

云臺一般分兩類,一類是做高速運轉的球形攝像機,價格昂貴;另一類是以兩個交流或直流電機組成的安裝平臺,通過控制系統在遠端可以控制其水平和垂直方向的轉動,實現全方位監控,這樣的云臺控制起來費時費力,不節能。為此,在做一定的市場調研后,結合已有技術設計出一款基于單片機智能控制的云臺。該云臺能根據設防區域內安裝的多個傳感器采集的信息去控制由步進電機組成的云臺轉動,只要入侵者進入設防區域云臺就工作,人移動超過一定的距離,電機就轉帶動攝像頭轉動,始終保持人在監控攝像頭的視角范圍中心區域。整個工作過程全智能化,無需人操作,且步進電機易于控制轉動度數,轉動精確,可實現全方位準確監控攝像,使用方便節能。
本文引用地址:http://www.104case.com/article/201710/369120.htm系統組成
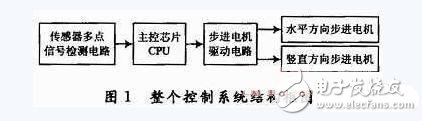
該智能控制云臺系統主要由人體紅外傳感器、主控芯片、驅動電路、四相步進電機組成,框圖如圖1所示。在該系統中,多個傳感器以云臺為中心組成多點信號監測電路,采集云臺四周(設計為八個方向,每個方向為45°的扇形區域)的多點數據,輸入主控芯片進行數據計算處理,主控芯片再輸出一定數量的脈沖給步進電機驅動電路,從而驅動步進電機帶動攝像頭轉動一定的角度,實現全方位自動追蹤監控。
主控芯片與驅動電路
AT89C52是Atmel公司生產的低電壓,高性能CMOS微處理器,片內帶8 KB的可反復擦寫只讀程序存儲器,共有4個八位I/O接口,功能強大。L298N是SGS半導體公司生產的步進電機專用控制芯片,能產生四相控制信號,輸出功率強,可用于控制兩相、三相和四相步進電機,易于與單片機結合,實現單片機控制。
設計中以AT89C52為主控芯片,在軟件的配合下用P0,P1口作為傳感器信號輸入口,掃描多點(設計為16點,也可視具體情況擴展)紅外傳感器的監測信息,信息經運算處理后,通過P2口輸出脈沖給L298N組成的電機驅動電路來驅動電機轉動一定的角度,從而帶動云臺上的攝像頭轉動一定角度(水平方向為 45°的倍數,最小45°,最大315°;豎直方向為15°的倍數,最小15°,最大75°,可通過軟件修改),實現自動控制。電機選用四相步進電機,每個電機用四位I/O口控制,所以P2口低四位控制水平方向電機,高四位控制豎直方向電機。水平和豎直方向電機除轉動角度不同,驅動原理完全一樣。
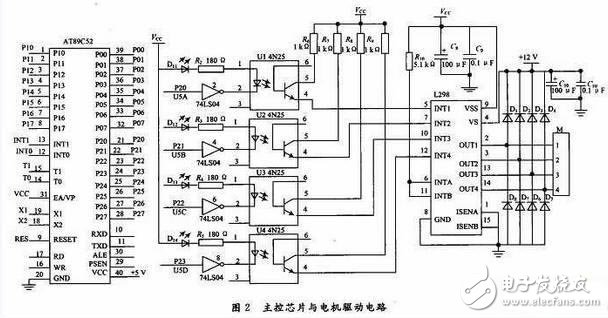
圖2所示為主控芯片與水平方向驅動電路,在電路中為避免電機工作時對單片機的干擾,驅動中加入反相器和光耦進行隔離,使單片機穩定可靠工作。
人體紅外傳感器采集電路
PIR是一種能以非接觸形式檢測出人體或動物輻射的紅外線能量變化并將其轉換成電壓信號輸出的傳感器。BIS0001是一種高性能的信號處理集成電路,由運算放大器、電壓比較器、延遲時間和封鎖時間定時器等構成,它與PIR和少量外接元器件可構成被動式的人體紅外傳感器采集電路。
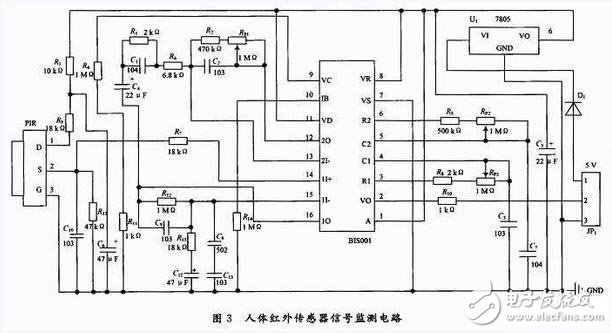
圖3所示為人體紅外傳感器信號監測電路,電路中PIR采用LHl778來監測人體紅外信號,采集的信號經BIS0001放大處理后以高低電平的形式輸出給單片機運算處理,從而實現對設防區域的信號采集。設計的監測電路中可通過調節精密電位器Rp1調節PIR探頭的靈敏度,實現對感應距離的控制,默認為5 m;調節Rp3控制信號的輸出延時時間(Tx),Tx≈49 152&TImes;R8Rp3C5,默認為Tx≈1 s;調節Rp2控制信號的輸出封鎖時間(TI),監測電路在這個時間里輸出低電平,TI≈24&TImes;R5Rp1C7,默認為1.2 s,所以結合Tx和Ti可控制監測電路的探測周期。實物中對PIR探頭做了兩種處理以實現對其監測面積的控制。當套用自制的金屬框時可實現對半徑為5 m,45°的扇形區域的探測,套用內徑為7cm的空心金屬套筒時,探測范圍變成一條長約5 m的直線。經多次驗證證明該傳感器達到設計功能。
攝像頭安裝平臺
步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元件,電機的轉速、停止位置取決于脈沖信號的頻率和脈沖數,精度高,且步距角越小,輸出轉矩越大,帶負載能力越強。設計中采用四相步進電機,它有三種工作方式:單四拍、雙四拍、八拍,四拍時步距角為1.8°,八拍時步距角為0.9°。考慮到對步距精度高和輸出轉矩大的要求,使電機工作于八拍方式,按(A-AB-B-BC-C-CD-D-AD-A)依次通電,電機正轉,反方向通電就反轉,可通過控制每個脈沖之間的通電時間來控制電機轉速。攝像頭安裝平臺由一個豎直放置和一個水平放置的步進電機組成,即云臺,可實現上下和左右轉動,從而帶動攝像頭實現全方位監控。
測試結果
在軟件調試成功后,進行了實物制作,經功能測試驗證達到設計要求。測試中監測了以云臺為中心八個方向,每個方向為45°的扇形區域,每個區域設兩個點,共 16個點的信息,驗證了設計功能。圖5所示四幅圖像為有人進入時,單片機自動控制云臺轉動時攝像頭(電腦攝像頭模擬)所拍攝的視屏部分畫面截圖。測試中以 A1A2,B1B2,C1C2,D1D2,E1E2,F1F2,G1G2,H1H2分別代表八個方向,下標1表示距離中心最近的一圈探測點(如 A1~H1),下標2表示離中心稍遠的一圈探測點(如A2~H2),16個點構成以云臺為圓心的極坐標系,在這16個位置中進行測試,設攝像頭初始位置為 A1區域。
無人進入傳感器監測區域時,云臺上的攝像頭停留在初始位置不動,當人從以云臺為中心的8個方向中任意方向進入傳感器探測區域時,電機能帶動攝像頭實現水平左右,豎直上下轉動,始終使人處在攝像頭視角范圍的中心區域,實現全方位智能追蹤監控攝像。經過多次測試和數據分析表明,該智能控制云臺上電后能按設計要求進入正常的工作狀態且準確度高,證實了方案的可行性和可靠性。
設計主要以單片機為控制核心,結合人體紅外傳感器組成的多點信號采集電路和L298N驅動電路去控制云臺,對進入設防區域內移動的入侵者進行全方位自動追蹤攝像。該云臺轉動角度精度高,帶負載能力強,運行穩定,且無人時不工作,很節能。與現在市面上的高速球形和遠程控制云臺相比,該云臺具有智能方便,運行省電節能,生產成本低,易于維護等優點。因此,利用該方法設計的云臺在經過一定的加工處理后在智能控制、監控等領域有很強的實用價值和現實意義。



評論