基于手機(jī)WIFI技術(shù)的遙控小車電路設(shè)計(jì)—電路圖天天讀(252)

設(shè)計(jì)任務(wù)及要求
本文引用地址:http://www.104case.com/article/201710/368302.htm1.1 設(shè)計(jì)任務(wù)與設(shè)計(jì)要求
本課題要求利用基于 Android (安卓)手機(jī)系統(tǒng)開發(fā)一個(gè)控制軟件,該軟件將實(shí)現(xiàn)用 WIFI 技術(shù)對(duì)玩具小車進(jìn)行遙控控制,包括小車前進(jìn)、后退 、轉(zhuǎn)彎等功能。
(1)實(shí)現(xiàn)手機(jī)與小車 WIFI 連接;
(2)能夠通過手機(jī)對(duì)小車進(jìn)行實(shí)時(shí)控制。
1.2 設(shè)計(jì)時(shí)要考慮的問題
a、由于該課題的小車端是通過單片機(jī)串口通信接收收手機(jī)是控制指令,因此需要對(duì)單片機(jī)定時(shí)器初值進(jìn)行設(shè)置, 若采用常用 12M 晶振, 初值不一定是整數(shù),通信時(shí)便會(huì)產(chǎn)生積累誤差,進(jìn)而產(chǎn)生波特率誤差,影響通信的同步性。采用11.0592M 晶振可以得到非常準(zhǔn)確的數(shù)值,因此在制作過程中最好采用 11.0592M或其整數(shù)倍的晶振。
b、小車電機(jī)啟動(dòng)時(shí)電流較大,可能會(huì)將電源的電壓瞬間拉低,導(dǎo)致單片機(jī)和路由器不能正常工作,因此必須設(shè)計(jì)一個(gè)可靠的供電系統(tǒng)。
c、 由于 Android 系統(tǒng)所有源代碼都已公開并且可以免費(fèi)使用, 各手機(jī)公司在開發(fā)自己產(chǎn)品時(shí)可以隨意改動(dòng)代碼,進(jìn)而在市場(chǎng)上出現(xiàn)了所謂的“基于 Android的· · · 改良系統(tǒng)” 手機(jī), 這些手機(jī)對(duì)安卓手機(jī)軟件兼容性有所差異, 因此必須選擇“安卓原版”的手機(jī)開發(fā)軟件,我們采用了“安卓 4.0”版本的操作系統(tǒng)。
d、由于單片機(jī) IO 口電流為 mA 級(jí),無法直接驅(qū)動(dòng)電機(jī),必須設(shè)計(jì)專門的電機(jī)驅(qū)動(dòng)模塊。
2 系統(tǒng)總體設(shè)計(jì)
2.1 方案論證
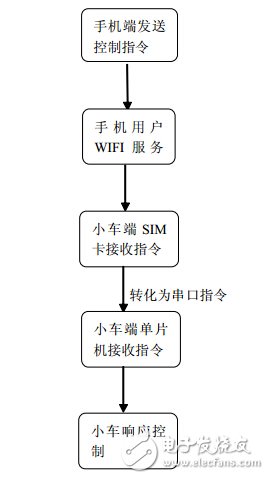
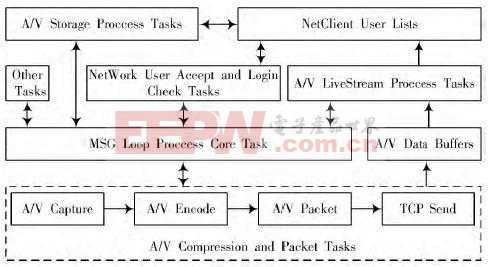
要實(shí)現(xiàn)手機(jī)通過 WIFI 控制小車,有兩種方案可以實(shí)現(xiàn):方案一:通過 SIM 卡來實(shí)現(xiàn)。系統(tǒng)框圖如下圖所示:
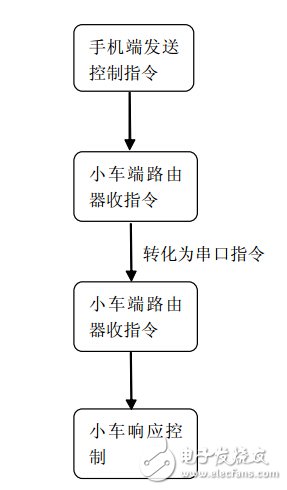
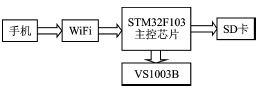
方案二:通過小型路由器來實(shí)現(xiàn)。該方案是在小車端安裝一個(gè)小型路由器,是小車周圍一定范圍具有 WIFI 覆蓋, 然后將手機(jī)連接到路由器 IP 地址, 對(duì)其發(fā)送指令, 路由器接收指令后對(duì)單片機(jī)串口發(fā)送數(shù)據(jù)指令, 實(shí)現(xiàn)控制。 系統(tǒng)框圖如下:
通過比較以上兩種方案。 方案一雖然可以實(shí)現(xiàn)小車超遠(yuǎn)程控制, 但開發(fā)成本較高, 相對(duì)于大一學(xué)生來說技術(shù)難度較大, 而且控制過程要消耗上網(wǎng)流量。 而方案二則相對(duì)簡(jiǎn)單,開發(fā)難度較低,適合制作玩具小車,因此我們選擇了方案二。
2.2 總體設(shè)計(jì)框圖
遙控小車系統(tǒng)總框圖如下所示
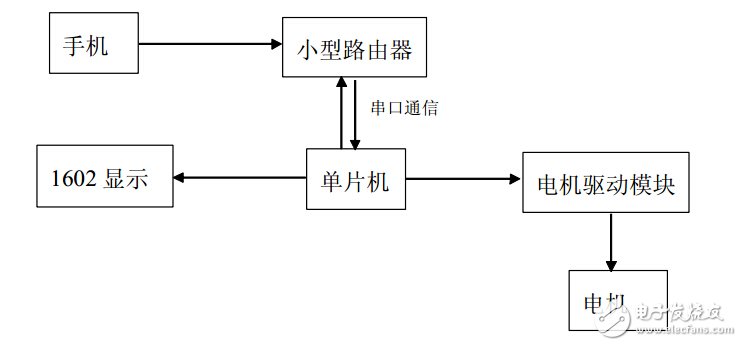
3 系統(tǒng)硬件設(shè)計(jì)
系統(tǒng)的硬件框圖如圖所示,包括六個(gè)部分組成。下面將分別介紹該六個(gè)單元。
3.1 手機(jī)端設(shè)計(jì)
3.2 手機(jī)選擇
由于安卓系統(tǒng)的極速發(fā)展,現(xiàn)在安卓智能機(jī)的價(jià)格已經(jīng)能降到 600 元以下,基于安卓的應(yīng)用軟件層出不窮。 由于安卓系統(tǒng)所有源代碼都已公開并且可以免費(fèi)使用, 各手機(jī)公司在開發(fā)自己產(chǎn)品時(shí)可以隨意改動(dòng)代碼, 進(jìn)而在市場(chǎng)上出現(xiàn)了所謂的“基于 Android 的· · ·改良系統(tǒng)”手機(jī),源代碼的改動(dòng)會(huì)影響手機(jī)對(duì)安卓軟件的兼容性, 增大開發(fā)難度,因此必須選擇“安卓原版”的手機(jī)開發(fā)軟件,我們采用了“安卓 2.3.3”版本的操作系統(tǒng)。
3.3 單片機(jī)電路
3.3.1 單片機(jī)選擇
在這里, 單片機(jī)要實(shí)現(xiàn)對(duì)電機(jī)驅(qū)動(dòng)模塊的控制, 同時(shí)還要有路由器進(jìn)行串口通信, 為了能夠控制電機(jī)轉(zhuǎn)速, 可以使用單片機(jī)的定時(shí)器來實(shí)現(xiàn), 利用單片機(jī)定時(shí)器功能控制 IO 口產(chǎn)生 PWM 波,通過調(diào)節(jié)占空比里調(diào)節(jié)電機(jī)轉(zhuǎn)速。
此外,STC89C52 設(shè)計(jì)和配置了振蕩頻率可為 0Hz 并可通過軟件設(shè)置省電模式。空閑模式下,CPU 暫停工作,而 RAM 定時(shí)計(jì)數(shù)器,串行口,外中斷系統(tǒng)可繼續(xù)工作, 掉電模式凍結(jié)振蕩器而保存 RAM 的數(shù)據(jù), 停止芯片其它功能直至外中斷激活或硬件復(fù)位。 同時(shí)該芯片還具有 PDIP、 TQFP 和 PLCC 等三種封裝形式, 以適
應(yīng)不同產(chǎn)品的需求。
該單片機(jī)主要特性:
• 8031 CPU 與 MCS-51 兼容
• 8K 字節(jié)可編程 FLASH 存儲(chǔ)器(壽命:1000 寫/擦循環(huán))
• 全靜態(tài)工作:0Hz-24KHz
• 三級(jí)程序存儲(chǔ)器保密鎖定
• 128*8 位內(nèi)部 RAM
• 32 條可編程 I/O 線
• 兩個(gè) 16 位定時(shí)器/計(jì)數(shù)器
• 6 個(gè)中斷源
• 可編程串行通道
• 低功耗的閑置和掉電模式
• 片內(nèi)振蕩器和時(shí)鐘電路
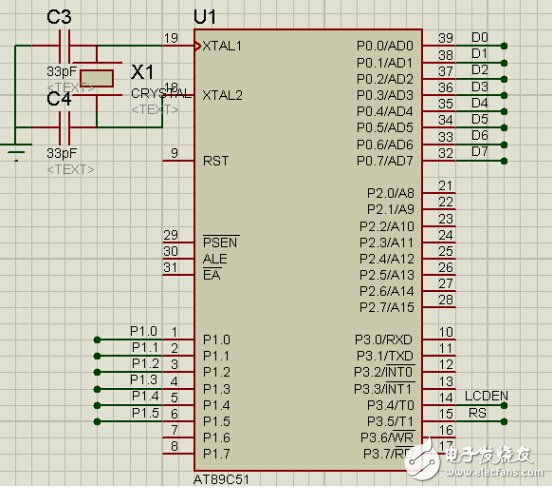
3.3.2 晶振選擇
由于該課題的小車端是通過單片機(jī)串口通信接收收手機(jī)是控制指令, 因此需要對(duì)單片機(jī)定時(shí)器初值進(jìn)行設(shè)置,若采用常用 12M 晶振,初值不一定是整數(shù), 通信時(shí)便會(huì)產(chǎn)生積累誤差,進(jìn)而產(chǎn)生波特率誤差,影響通信的同步性。采 用11.0592M 晶振可以得到非常準(zhǔn)確的數(shù)值,因此在制作過程中最好采用 11.0592M或其整數(shù)倍的晶振。
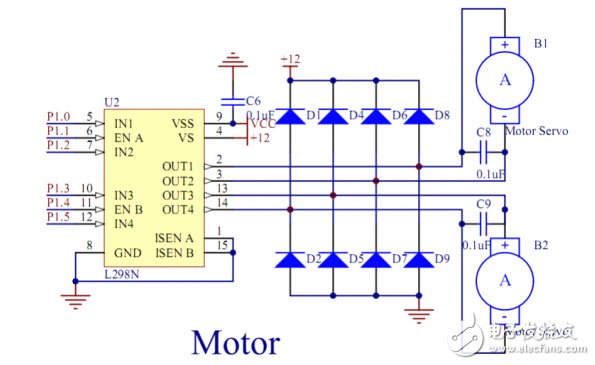
3.4 電機(jī)驅(qū)動(dòng)模塊
由于小車底盤電機(jī)額定電壓為 12V, 度電機(jī)驅(qū)動(dòng)模塊選擇了常用 12V 電機(jī)驅(qū)動(dòng)芯片 L298N。
L298N 恒壓恒流橋式 2A 驅(qū)動(dòng)芯片, L298N 可接受標(biāo)準(zhǔn) TTL 邏輯電平信號(hào) VSS,VSS 可接 4. 5~7 V 電壓。 4 腳 VS 接電源電壓, VS 電壓范圍 VIH 為+2. 5~46 V。輸出電流可達(dá) 2.5 A,可驅(qū)動(dòng)電感性負(fù)載。1 腳和 15 腳下管的發(fā)射極分別單獨(dú)引出以便接入電流采樣電阻, 形成電流傳感信號(hào)。 L298 可驅(qū)動(dòng) 2 個(gè)電動(dòng)機(jī), OUT1,OUT2 和 OUT3,OUT4 之間可分別接電動(dòng)。
3.5 電機(jī)
12V 138rpm 直流電機(jī)
3.6 電源設(shè)計(jì)
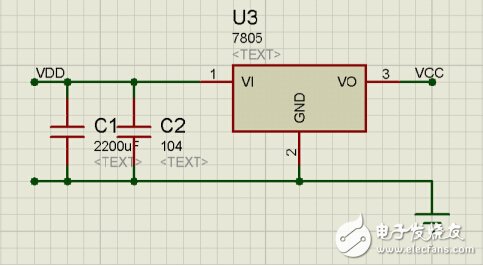
小車電機(jī)啟動(dòng)時(shí)電流較大, 可能會(huì)將電源的電壓瞬間拉低, 導(dǎo)致單片機(jī)和路由器不能正常工作,因此必須設(shè)計(jì)一個(gè)可靠的供電系統(tǒng)。
解決該問題常用以下三種方法:
1)、選用性能更好的的電源:
2)、采用獨(dú)立電源供電,即使用兩個(gè)電源分別給單片機(jī)和電機(jī)供電;
3)、在電源附近并聯(lián)一個(gè)較大值的電容,當(dāng)電機(jī)啟動(dòng)時(shí),電流較大,電容中的電可以補(bǔ)償一部分電流,保證電壓不至于太低。
編輯點(diǎn)評(píng):該項(xiàng)目的獨(dú)特創(chuàng)新之處在于小車的控制是通過手機(jī)來實(shí)現(xiàn), 而不是遙控手柄或電腦,從而使用更加方便,實(shí)現(xiàn)用 WIFI 技術(shù)對(duì)玩具小車進(jìn)行遙控控制,包括小車前進(jìn)、后退、轉(zhuǎn)彎等功能。
電子發(fā)燒友《汽車電子特刊》,更多優(yōu)質(zhì)內(nèi)容,馬上下載閱覽









評(píng)論