無人機飛控系統的原理、組成及作用詳解

無人機已經廣泛應用于警力、城市管理、農業、地質、氣象、電力等領域,無人機的飛控系統、云臺、圖像傳輸系統都是關鍵部分。無人機飛控系統作為其“大腦”具體的作用是什么?由哪些部分組成?在設計時應該注意哪些問題?
本文引用地址:http://www.104case.com/article/201710/367554.htm無人機飛控的作用
無人機飛行控制系統是指能夠穩定無人機飛行姿態,并能控制無人機自主或半自主飛行的控制系統,是無人機的大腦,也是區別于航模的最主要標志,簡稱飛控。
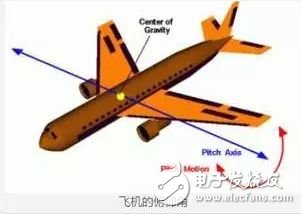
固定翼無人機飛行的控制通常包括方向、副翼、升降、油門、襟翼等控制舵面,通過舵機改變飛機的翼面,產生相應的扭矩,控制飛機轉彎、爬升、俯沖、橫滾等動作。不過隨著智能化的發展,無人機已經涌現出四軸、六軸、單軸、矢量控制等多種形式。
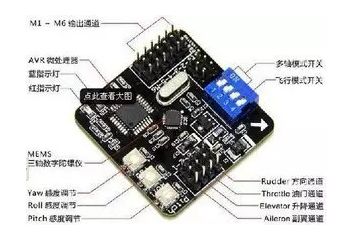
傳統直升機形式的無人機通過控制直升機的傾斜盤、油門、尾舵等,控制飛機轉彎、爬升、俯沖、橫滾等動作。多軸形式的無人機一般通過控制各軸槳葉的轉速來控制無人機的姿態,以實現轉彎、爬升、俯沖、橫滾等動作。飛控的作用就是通過飛控板上的陀螺儀對無人機進行控制,具體來說,要對四軸飛行狀態進行快速調整,如發現右邊力量大,向左傾斜,那么就減弱右邊電流輸出,電機變慢、升力變小,自然就不再向左傾斜。如果沒有飛控系統,四軸飛行器就會因為安裝、外界干擾、零件之間的不一致等原因形成飛行力量不平衡,后果就是左右、上下地胡亂翻滾,根本無法飛行。
無人機飛控的工作過程
飛控系統實時采集各傳感器測量的飛行狀態數據、接收無線電測控終端傳輸的由地面測控站上行信道送來的控制命令及數據,經計算處理,輸出控制指令給執行機構,實現對無人機中各種飛行模態的控制和對任務設備的管理與控制;同時將無人機的狀態數據及發動機、機載電源系統、任務設備的工作狀態參數實時傳送給機載無線電數據終端,經無線電下行信道發送回地面測控站。
飛控系統組成模塊
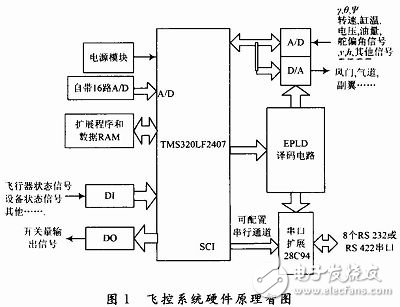
按照功能劃分,該飛控系統的硬件包括:主控制模塊、信號調理及接口模塊、數據采集模塊以及舵機驅動模塊等。
具體的硬件構成原理如圖1所示。
模塊功能
各個功能模塊組合在一起,構成飛行控制系統的核心,而主控制模塊是飛控系統核心,它與信號調理模塊、接口模塊和舵機驅動模塊相組合,在只需要修改軟件和簡單改動外圍電路的基礎上可以滿足一系列小型無人機的飛行控制和飛行管理功能要求,從而實現一次開發,多型號使用,降低系統開發成本的目的。
系統主要完成如下功能:
(1)完成多路模擬信號的高精度采集,包括陀螺信號、航向信號、舵偏角信號、發動機轉速、缸溫信號、動靜壓傳感器信號、電源電壓信號等。
由于CPU自帶A/D的精度和通道數有限,所以使用了另外的數據采集電路,其片選和控制信號是通過EPLD中譯碼電路產生的。
(2)輸出開關量信號、模擬信號和PWM脈沖信號等能適應不同執行機構(如方向舵機、副翼舵機、升降舵機、氣道和風門舵機等)的控制要求。
(3)利用多個通信信道,分別實現與機載數據終端、GPS信號、數字量傳感器以及相關任務設備的通信。由于CPU自身的SCI通道配置的串口不能滿足系統要求,設計中使用多串口擴展芯片28C94來擴展8個串口。

評論