基于MEMS六軸傳感器的可穿戴運動監測系統設計

現在市面上的可穿戴設備越來越多,對于可穿戴設備,尤其是手腕式的可穿戴設備的競爭日益激烈。對于可穿戴設備的研究核心在于可穿戴傳感器的研究。可穿戴設備的功能日趨強大與其內部使用的可穿戴傳感器數量的增加和性能提高息息相關。本文基于MEMS 六軸傳感器技術,目的在于設計出一套可以用于運動軌跡檢測的可穿戴設備。利用現有的藍牙4.0 技術,將六軸傳感器收集到的數據實時傳送到上位機,通過MATLAB 等仿真軟件以及合理的數據處理,得到最接近現實的運動軌跡。
本文引用地址:http://www.104case.com/article/201710/366235.htm可穿戴運動監測系統是可穿戴計算在體育領域的典型應用,可穿戴運動監測系統旨在不妨礙用戶運動的前提下,為用戶提供連續、準確的運動監測功能。國內外學者已在該研究領域做了大量的工作,研制出許多相關的設備和應用。然而這些設備或者應用不是體育專家,并不能真正根據這些信息給出準確的建議,只能根據這些信息給出大致運動評估。另一方面,由于缺乏大規模的數據處理能力、多維度的數據分析能力,以及深入的數據挖掘能力,即便收集的數據里蘊含大量有用信息,甚至包括可以直接用于分析運動的數據,基于數據處理挖掘能力問題,也會被海量數據淹沒。
鑒于此,文中提出了一種新的可穿戴系統。該系統基于MEMS 六軸傳感器,通過采集物體在運動過程中產生的以六軸傳感器為校準點的三軸加速度和三軸角速度,通過藍牙4.0無線傳輸到配備了藍牙USBdongle 的上位機進行數據處理和軌跡模擬。
1 可穿戴運動監測系統基本原理
本文中的可穿戴運動監測系統建立于仿真運動軌跡的慣性技術的基礎上,主要通過運動傳感器實現。本系統主要采用了倆種運動傳感器:三軸加速度傳感器和三軸陀螺儀傳感器。加速度傳感器用來測量運動物體的加速度,作為計算速度和位移的原始數據。陀螺儀用來測量于東物體的角速度,以此確定三維空間中運動物體的加速度傳感器的參考坐標系,有利于位移軌跡的計算。
1.1 加速度傳感器工作原理
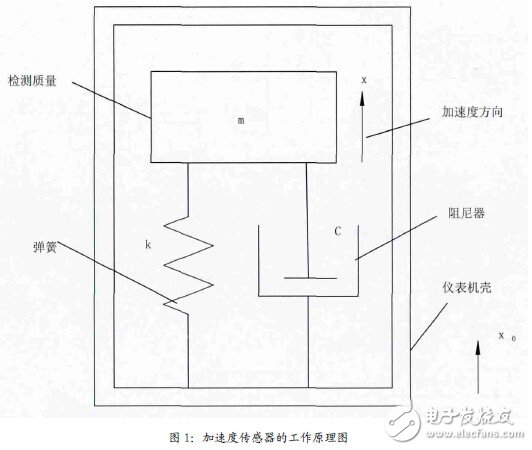
加速度是表征物體在空間運動本質的一個基本物理量,可以通過測量加速度來測量物體的運動狀態。加速度傳感器的基本原理可以由圖1 說明,其中m 是指方塊的質量,k 是彈簧的剛度,c 是阻尼器與儀表殼相連。
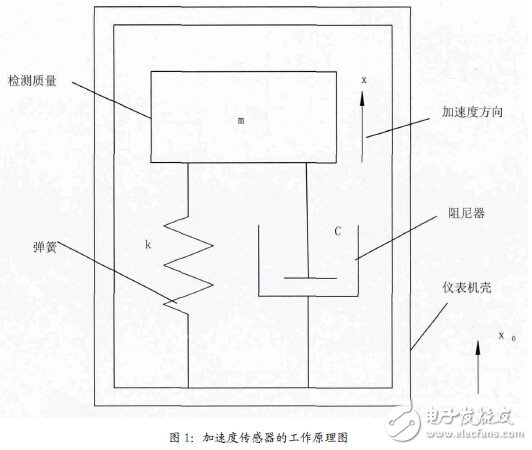
圖1:加速度傳感器的工作原理圖
傳感器基座與被測運動體相固聯,因而隨運動物體一起相對于慣性空間的某一參考點作相對運動。由于檢測質量塊不與傳感器基座固聯,因而在慣性力作用下將與儀表機殼產生相對位移。檢測質量塊感受加速度并產生于加速度成比例的慣性力,從而使彈簧產生與質量塊相對位移相等的伸縮變形,彈簧變形又產生與變形量成比例的反作用力。當慣性力與彈簧反作用力相平衡時,檢測質量塊相對于基座的位移與加速度成正比,故可通過該位移或慣性力來測量加速度。
根據胡克定律,公式如下:
Δx=x0-x (1)
F=kΔx=ma (2)
Δx 是檢測質量塊的相對位移。由上式可知,檢測質量塊的相對位移量Δx 與加速度a成正比。
1.2 陀螺儀工作原理
陀螺儀(gyroscope) 的原理就是一個旋轉物體的旋轉軸所指方向在不受外力是不會改變的。就像一個陀螺在高速旋轉的時候是不會倒下。但是陀螺儀工作的實收是必須要給它一個力,使它快速旋轉起來,旋轉速率一般要達到幾十萬轉,這樣就能工作很長時間。采用多種方法讀取軸的信息,并將信號傳給控制系統前,進而進行分析和處理。
1.3 MEMS六軸傳感器工作原理
MEMS慣性傳感器采用集成電路的工藝,以其獨特的加工工藝區別于其他慣性傳感器。優點在于可靠性高、制造成本低廉、并且壽命更長。同時還具有重量輕、易集成、耗電量低、體積小、能大批量生產的特點。MEMS 傳感器在同一個芯片上進行信號傳輸前可放大信號,提高信號水平,減小干擾和傳輸噪聲。特別是同一芯片上進行A/D 轉換時,更能改善信噪比。
MEMS 六軸傳感器是由一個三軸陀螺儀傳感器和一個三軸加速計傳感器集成在同一個芯片上,可以實時輸出陀螺儀和加速計讀取到的數據。加速計的原理和傳統的原理形似。三軸陀螺儀的工作原理則與傳統的陀螺儀原理不同,傳統的陀螺儀理論依據是角動量守恒定律。不停轉動的物體,他的轉軸指向是不隨它原本的支架的轉動而變化的。MEMS 陀螺儀是利用科里奧式力,物體被驅動,不停的來回做頸向運動,科里奧式力就不在橫向來回變化。
2 可穿戴硬件系統的設計
本硬件系統的主要組成是由傳感器的數據采集和藍牙射頻倆部分構成。傳感器部分主要由六軸傳感器MPU6050 和氣壓溫度傳感器BMP180,藍牙芯片選用TI 公司的CC2541。MPU6050 和BMP180 通過I2C 總線和CC2541相連,將采集到的數據傳輸給藍牙芯片。藍牙芯片再通過板子上的巴倫濾波器和陶瓷天線將收集到的數據傳輸出去。詳細系統原理圖2。將倆部分電路集成在同一個電路板在上,制作出一套開穿戴開發平臺,如圖3。通過這套自行研發的開發平臺,可以做大量軌跡實驗,為下一步的軌跡模擬提供了實驗環境保證。
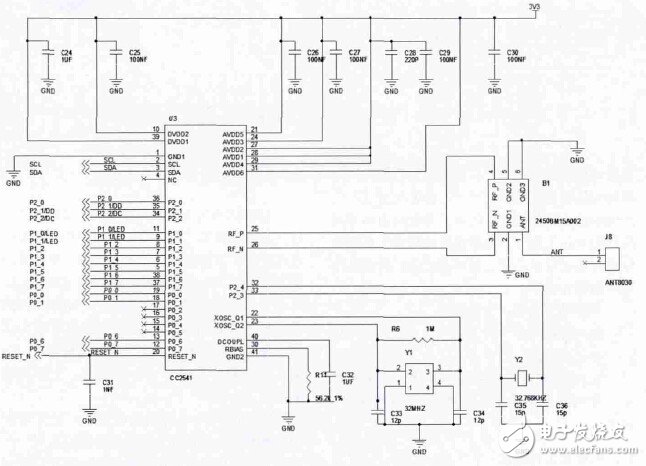
圖2(a):系統電路原理圖CC2541 部分
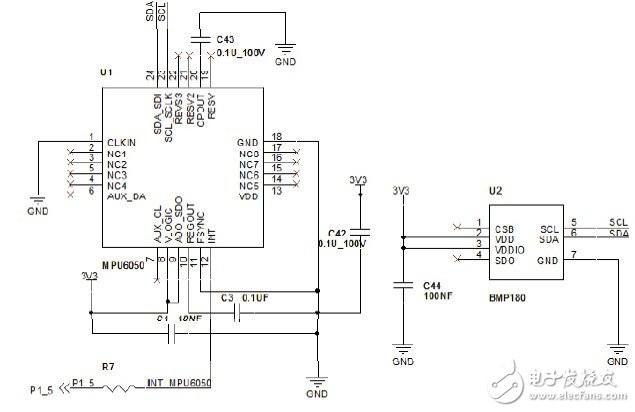
圖2(b):系統電路原理圖傳感器部分
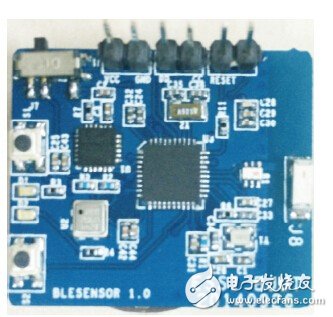
圖3:可穿戴開發設備
3 運動軌跡仿真系統設計
基于已有的可穿戴開發平臺,本仿真系統通過對運動軌跡產生的加速度信號進行數據采集。對采集到的信號進行預處理之后完成對加速度積分以及后期的誤差補償,最后實現對運動軌跡的1:1 的仿真。
仿真系統主要分為三個主要部分:六軸傳感器、藍牙和上位機處理。六軸傳感器主要包括三軸加速度傳感器和三軸陀螺儀,分別對運動過程中產生的加速度信號和角速度信號進行采集;藍牙主要負責接收六軸傳感器采集到的數據,并將數據通過藍牙信號輸出給上位計算機;上位機處理主要實現數據處理的功能。
仿真系統總體結構圖如圖4 所示。
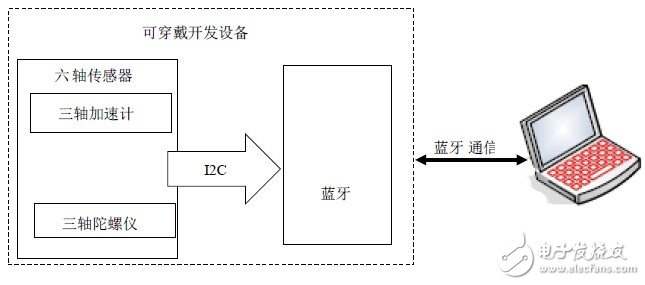
圖4:仿真系統結構圖
4 運動軌跡仿真實驗測試結果
通過藍牙芯片,限定六軸傳感器的采集速率為每秒20 組數據,一組六個值包括三個加速度值和三個角速度值,每個值包括16 個字節。將采集到的原始數據直接通過藍牙傳輸發送到計算機中進行處理,然后通過MATLAB對數據進行數據處理和軌跡仿真。如圖5,確定坐標系。
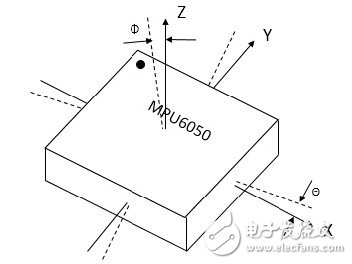
圖5:傳感器的坐標系示意圖
4.1 靜止狀態
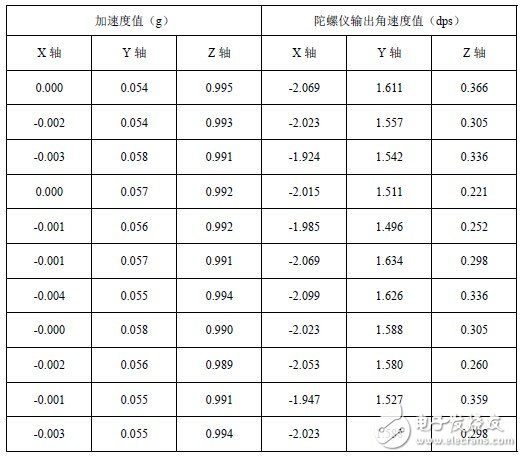
在完全靜止狀態下,將可穿戴開發平臺放置水平桌面,Z 軸方向垂直于水平桌面,與重力方向重合。理論上講,加速度值在X 軸和Y 軸輸出為0,Z 軸輸出為1g;陀螺儀的輸出應該全部為0。但是由于隨機噪聲的存在,輸出值應該有一定的偏差。測量30s 得到的600組數據。選擇其中的10 組如下表。示意圖如表1。
表1
4.2 勻速狀態
選取XYZ 三個軸中的X 軸,沿X 軸做勻速直線運動,采集傳感器得到的數據。將可穿戴開發平臺沿X 軸方向勻速移動19s,共采集到380 組數據,選其中10 組數據如表2。
表2

5 結論
本可穿戴開發平臺設計是基于MEMS 六軸傳感器MPU6050 的基本原理,并且結合了藍牙的傳輸技術,可以方便、快速的將運動采集到的數據快速的傳輸到PC 上。采集到的數據主要應用于后期可穿戴計算的研究。









.jpg)

評論