智能傳感器中由于欠采樣引起的噪聲

很多系統開發人員喜歡使用完全集成式“智能傳感器”,因為這些器件通常可方便地給出數字輸出,對于偶爾使用的用戶來說可以規避乏味的模擬電路設計挑戰所帶來的風險。雖然避開模擬電路設計問題的動機可以理解,但系統集成人員了解智能傳感器的重要模擬特點也是非常關鍵的—比如帶寬和噪聲,因為這些因素會影響重大的系統級決策,如數據采樣和處理速率。
本文引用地址:http://www.104case.com/article/201710/366083.htm以自主駕駛車輛(AV)平臺為例,該平臺采用ADIS16460的陀螺儀作為其導航控制系統(GNC)中的反饋檢測元件。如果開發人員未能考慮這些陀螺儀的330Hz帶寬,那么就可能完全根據AV平臺的運動配置來設置角速率反饋環路中的采樣速率。
例如,假設GNC工程師相信可以將AV平臺的運動配置限制在4Hz頻譜成分以內,那么以40 SPS速率進行數據采集就會看起來是一種對于GNC角速率反饋環路的采樣速率而言較為保守的做法。不幸的是,如果不進行任何前置濾波,那么這種“保守”的做法實際上會欠采樣330Hz帶寬,而這樣就會有很多劣勢。圖1顯示了其中一個劣勢,即對輸出奈奎斯特頻段(20Hz)內的噪聲能量進行重整分配。
圖1中,綠色曲線表示自然速率噪聲密度(RND),而紅色曲線表示同樣的總噪聲能量分布在較窄的20 Hz帶寬內的結果。
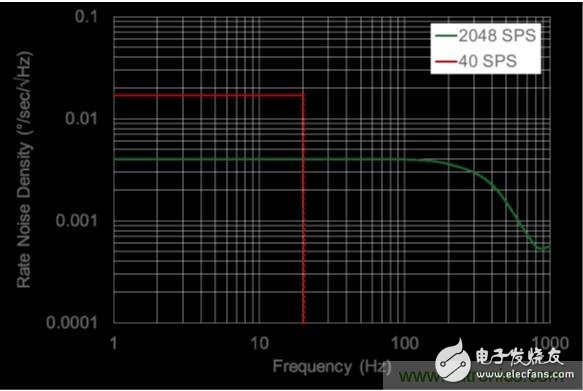
圖1. ADIS16460角速率噪聲密度
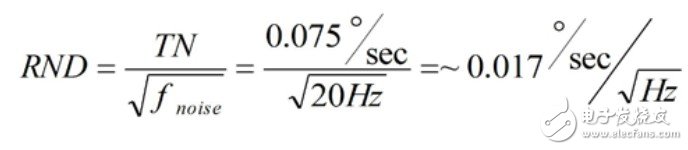
假設總噪聲平均分布在低采樣速率( 40 SPS )奈奎斯特頻段內,通過下述關系式可以預測,得到的速率噪聲密度將大約為0.017°/sec/√Hz:
這意味著使用2048 SPS全采樣速率時,對40 SPS數據的任何數字濾波都將導致產生比同類濾波器多大約4倍的噪聲。根本問題在于,對于系統集成人員而言,明智的做法是考慮智能傳感器中的關鍵模擬屬性,通過適當選擇采樣速率以及正確設計數字濾波器,便能有機會進行性能優化。







評論