基于LabVIEW的半實物虛擬仿真實驗平臺

3.4 PID控制
本文引用地址:http://www.104case.com/article/201709/364873.htm虛擬控制采用LabVIEW的虛擬仿真功能得到理想的PID圖像的部分前面板如圖8所示。在前面板中設置PID的輸入控件,分別為比例參數、積分參數、微分參數和轉速目標參數。參數經過PID子VI的運算得到輸出值,通過LabVIEW的仿真波形圖來顯示模擬的PID圖像。
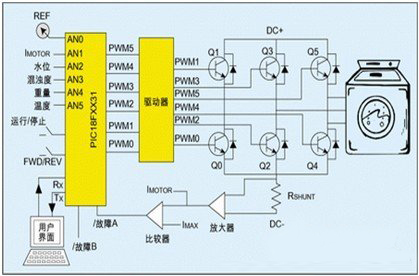
在實物平臺上采用位置式PID控制來調節電機的轉速。使用MSP430單片機的定時器的比較模式輸出經過PID調節所得到的占空比來調節電機轉速,使電機轉速穩定在一定的范圍內,實現實物的PID控制。在模擬系統中,PID算法的表達式為:

式中,P(t)為調節器的輸出信號,e(t)為調節器的偏差信號,它等于測量值與給定值之差,Kp為調節器的比例系數,KI為調節器的積分時間,TD為調節器的微分時間。
在過程控制中,按偏差的比例(P)、積分(I)和微分(D)進行控制的PID控制器(亦稱PID調節器)是應用最為廣泛的一種自動控制器。
PID調節器各個校正環節的作用:
(1)比例環節:及時成比例的反應控制系統的偏差信號e(t),偏差一旦產生,調節器立即產生控制作用以減少偏差。
(2)積分環節:主要用于消除誤差,以提高系統無差度。積分作用的強弱取決于積分時間常數,時間常數越大,積分作用越弱,反之越強。

(3)微分環節:能反映偏差的變化趨勢(變化速率),并能在偏差信號的值變得太大之前,在系統中引入一個早期的有效修正信號,從而加快系統的動作速度,減少調節時間。
模擬信號r(t)、e(t)、u(t)、c(t)在第n次采樣的數據分別用r(n)、e(n)、u(n)、c(n)表示,于是有 。
。
從而可以推導出數字PID算法:

將此式代入程序中調節好Kp、KI、Kd這三個參數,進而調節PWM使電機轉速達到設定值。在實際應用中,數字PID算法的積分項可能會引起飽和現象,導致帶幅度的超調,使系統不穩定。
為了消除飽和積分的影響,我們采用遇限削弱積分法:一旦控制量進入飽和區,則停止進行增大積分的運算。

3.5 LabVIEW的編制及界面
上位機數據的采集通過一個獨立的子VI完成,通過子VI把串口的數據處理分類,用兩個輸出將數據送給下一個子VI,設置的串口參數必須匹配連接儀器或設備的參數“讀數”參數可指定串口讀取的字節數。如果端口字節超過指定的字節數,超出部分將不會被讀取。如果端口字節數少于指定的字節數,將返回超時錯誤。

上一個子VI輸出的數據被下一個子VI獲取,通過LabVIEW的波形圖示實時的顯示采集的數據。其部分數據如圖9所示。

在虛擬平臺的編制上我們使用了LabVIEW強大的數據處理功能,把實物用數據的形式模擬出來。設置參數和期望值,通過PID子VI模擬出圖像顯示出來。

對于電機虛擬圖像,可通過前面板設計設置理想轉速、PID參數,如圖10所示。從而實現對虛擬電機轉速的控制,進行誤差分析。 誤差分析表示當前實際轉速和設定轉速的差值,如圖11所示。

4 結論
本文采用MSP430單片機進行數據采集,充分利用了單片機的高速性和高可靠性,從而解決了傳統的單片機控制速度較慢的問題。該系統成功采集到各項數據并得到數據圖像,是一套比較完整的虛擬仿真平臺系統,通過軟硬件結合實現儀器功能,具有較好的推廣和應用價值。
參考文獻:
[1]沈建華,楊艷琴,翟驍曙.MSP430系列16位超低功耗單片機實踐與系統設計[M].北京:清華大學出版社,2004.
[2]崔武子,付鈧,鞠慧敏.C語言程序設計實踐教程[M].北京:清華大學出版社,2005.
[3]魏小龍.MSP430系列單片機接口技術及系統設計實例[M].北京:北京航空航天大學出版社,2002.
[4]馬育鋒,龔沈光.基于MSP430單片機的多路信號采集系統[J].武漢理工大學學報(交通科學與工程版),2009,33(2):369-372.
[5]李楠,騰飛.基于LabVIEW的電機轉速控制系統設計[J].計算機測量與控制,2006.14(6):794-796.
[6]丁元杰.單片微機原理及應用(第 3 版)[M].北京:機械工業出版社,2005.
本文來源于《電子產品世界》2017年第10期第39頁,歡迎您寫論文時引用,并注明出處。






評論