基于LDC1000和Kinetis微控制器的金屬探測系統設計

本文以LDC1000傳感器以及飛思卡爾Kinetis系列微控制器K60為核心,組成具有定位功能的金屬探測系統。通過金屬的渦流效應對金屬物體進行檢測,能夠在一定范圍內迅速定位出金屬物體的精確位置。經實驗表明,距離物體中心定位誤差不超過4 mm,最小可以檢測出2 cm2大小的金屬物體。測量數據在單片機中進行處理,軟件上采用了數字濾波,進一步減少了誤差干擾信號,提高了系統的穩定性與精確性。該系統可通過LCD液晶顯示屏顯示當前金屬物體所在具體位置,并利用按鍵實現人機交互。
本文引用地址:http://www.104case.com/article/201706/359941.htm引言
金屬探測儀作為一種非接觸式檢測裝置,在工業領域以及日常安檢中有著十分廣泛的應用,對于金屬的檢測,金屬探測儀往往需要有較高的精確度以及較快的反應速度。本文以飛思卡爾Kinetis系列微控制器K60為控制核心,通過LDC1000電感傳感器來探測金屬物體的位置。LDC1000傳感器是利用電磁感應的原理來探測與金屬物體的間距,而且對于不同的金屬材質,其感應的強度也不同。將LDC1000電感傳感器的數據傳輸至微控制器中,經過軟件處理后最終確定金屬的位置。通過直線電機和滑軌來控制LDC1000傳感器探頭的運動與探測。由于橫向掃描的精度要求高,所以選用步進電機的方法來掃描,而縱向掃描要求速度快,所以選用直線電機來掃描。
同時,系統可以通過撥碼開關來選擇探測的金屬物體類型,且探測的時間和探測到的金屬物體的位置可由液晶顯示,具有較好的人機界面。
系統設計結構簡單,制作成本低,控制精度高,可以廣泛地用于機場、車站、碼頭等地方的安檢,既可檢測旅客包裹中帶有的危險管制刀具等,也可以檢測藏在人眼所觀察不到的地方的金屬。
1 LDC1000工作原理簡介
LDC1000是一款非接觸式、短程傳感的電感檢測傳感器芯片,能夠將模擬電感值轉換為數值量,同時具有低成本、高分辨率遙感的導電性。它的內置處理芯片具有SPI通信接口,能夠很方便地與單片機進行通信。LDC1000只需要外接一個PCB線圈或者自制線圈就可以實現非接觸電感檢測,測試外部金屬物體和 LDC相連的測試線圈的空間位置關系。利用這個特性配以外部設計的金屬物體,即可很方便地實現水平或垂直距離檢測、角度檢測、位移檢測、運動檢測、振動檢測和金屬成分檢測。
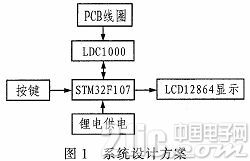
LDC1000的電感檢測利用的是電磁感應原理。如圖1所示,傳感器內部會產生一個交變電流,加在PCB線圈或者自制線圈上,線圈周圍會產生交變電磁場,這時如果有金屬物體進入這個電磁場,則會在金屬物體表面產生渦流(感應電流)。由于渦流電流跟線圈電流方向相反,因此渦流產生的感應電磁場跟線圈的電磁場方向相反。渦流是金屬物體的距離,大小、成分的函數。渦流產生的反向磁場與線圈耦合在一起,就像是有另一個次級線圈存在一樣。LDC1000的線圈作為初級線圈,渦流效應作為次級線圈,這樣就形成了一個變壓器。由于變壓器的互感作用,在初級線圈這一側就可以檢測到次級線圈的參數。

圖1中,Ls是初級線圈電感值,Rs是初級線圈的寄生電阻;L(d)是互感值,R(d)是互感的寄生電阻,括號中的d表示L(d)和R(d)是距離的函數;交變電流只加在電感上(初級線圈),則在產生交變磁場的同時也會消耗大量的能量。這時將一個電容并聯在電感上,由于LC的并聯諧振作用能量損耗大大減小,只會損耗在Rs和R(d)上。如圖2所示,可以看出,檢測到R(d)的損耗就可以間接地檢測到d。
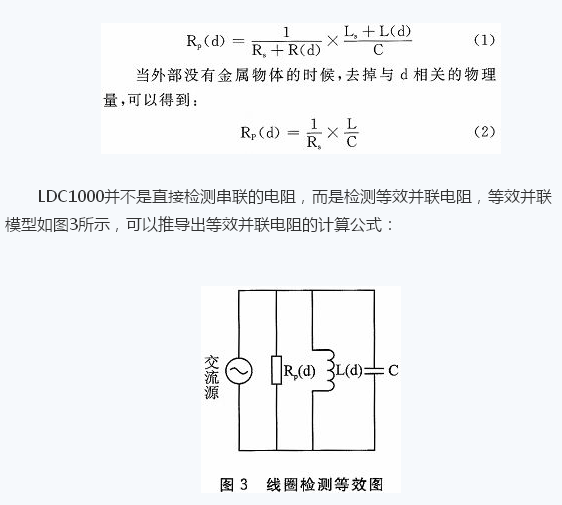
在LDC1000中,等效并聯電阻Rp被轉換為數字量,這個數值的大小與Rp成反比。觀察式(2)可知,Rp與Rs成反比,同時由于Rs大小與LC諧振損耗成正比,由此可得數字量數值大小與LC諧振損耗成正比,渦流越大,損耗越大。
2 金屬探測定位系統的硬件設計
本文以LDC1000電感傳感器以及飛思卡爾Kinetis系列微控制器K60為核心,并且由直線電機驅動模塊、步進電機驅動模塊、直線電機、步進電機、LCD液晶顯示屏、矩陣按鍵、電源模塊電路、語音聲光模塊電路、紅外線模塊等組成,具體硬件連接圖如圖4所示。
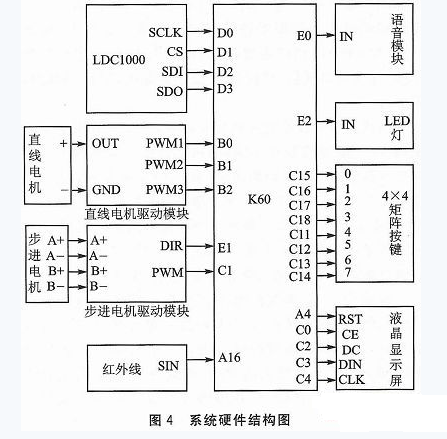
為了在某個指定大小的區域內快速檢測并定位不同材質的目標金屬,系統采用步進電機以及直線電機,利用X軸和Y軸連續掃描工作模式。
(1)電源的選擇
由于系統需要驅動步進電機、直流電機等,同時要求供電電源穩定可靠,所以直接選擇數控穩壓源進行供電。給直線電機與步進電機提供+12 V~-12 V的直流電壓,然后進入降壓電路,將電壓降低到5 V以及3.3 V,給K60微控制器以及其他模塊供電。
(2)傳感器的選擇
本文選擇了OMROM反射式紅外光電開關,感應距離為1~50 cm(可調),感應方式為漫反射(非透明物),工作電壓為DC 4.5~5.5 V,工作電流為50 mA,輸出方式為NPN常開,響應時間為2ms。用來檢測直線電機伸出的長度,這樣可以隨意設置直線電機運動的位置范圍,以達到快速定位的目的。
(3)電機的選擇
通過比較各種電機的性能,選用了兩種電機:一種是57步進電機,另一種是38直流電機。57步進電機具有高耐壓性,可達到500 V,同時徑向跳動最大0.02 mm(450g負載),軸向跳動最大0.08 mm(450g負載),步距精度可達5%。38直流電機出軸直徑為5 mm,電機直徑為38mm,電機長度為67 mm,轉速可高達4 000轉。因此,將它們結合使用既可以滿足速度要求,又可以滿足精度要求。





評論