基于DM642的定位視音頻采集器的系統設計與實現

地理信息系統( GIS)、全球定位系統( GPS)的廣泛應用使人們享受到了基于位置服務所帶來的諸多便利。傳統G IS 是以地圖為可視化主要手段, 然而人類獲取信息的70%來自于視覺,因此將地理位置信息和視頻信息有機結合可以極好的豐富G IS的內容, 產生許多新的應用。比如微軟的Windows Local Live、影像城市武漢等網站都相繼推出了實景地圖, 讓人們在網絡上能直觀、全面和便捷的了解各個城市。GPS信息和視頻信息的結合, 還有利于對地理信息系統進行3D 建模, 如日本巖根研究所推出的3DV ideoG IS軟件, 通過陸地上以及空中拍攝的具有定位信息的全景視頻圖像, 可以自動生成相應的高逼真的3D 場景模型。
為了針對以上這些應用需求, 本文中提出了一種一體化的視頻、音頻和定位信息的數據采集傳輸器。
本采集器不僅可以通過網絡直播的方式提供一個更自然、更真實、更及時的地理信息系統環境, 采集數據能為實景地圖和3D 場景地圖的構建提供素材, 還可以實現基于定位信息的視音頻數據的分割和檢索。
1 系統整體方案
為了實現采集器的高質量定位視音頻壓縮采集、實時的定位視音頻傳輸, 以及低功耗以便攜等要求, 系統中采用了T I公司的TMS320DM642作為了采集器的主控芯片。DM642 是TI公司推出的一款專門面向多媒體應用的TMS320C6000 家族中性能最高的定點DSP, 具有8路并行的運算器、3個視頻專用和2個音頻復用接口, 集成10 /100Mbit / s以太網MAC。該芯片具有的這些優點非常適合視音頻信息的采集、壓縮和傳輸。
圖1為采集器的硬件框圖。GPS定位數據通過串口由TL16C752B 讀入; 音頻信號由TLV320A IC23B以8 kH z, 16bit量化采樣; 視頻信號通過TVP5150采集。進入DM642 的定位數據一路通過低碼率的H 264視頻編碼后與G. 723的音頻編碼信號同步合成后, 通過無線網絡發送到遠程服務器, 另一路采用高碼率編碼后存儲到2. 5寸硬盤。
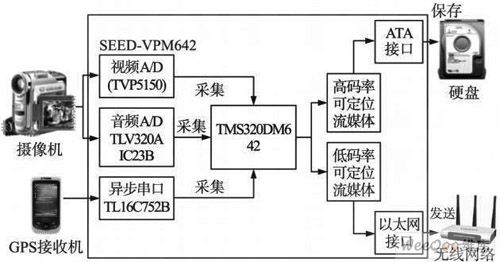
圖1 采集器硬件框圖
2 系統硬件設計
2. 1 視頻信號的采集
視頻信號的采集如圖2 所示, SCLK 為時鐘,GPCL為使能信號, Yout為8位BT. 656信號。系統中將DM642的VP0配置為VP0A + McASP模式, 其中VP0A 配置為8位BT. 656視頻輸入, 用來接一路視頻輸入。TVP5150PBS是一款高性能的視頻編碼器, 它將視頻信號模擬攝像頭輸出的NTSC /PAL模擬信號轉換成數字色差信號( YUV4: 2: 2), 輸出格式為ITU-R BT. 656。
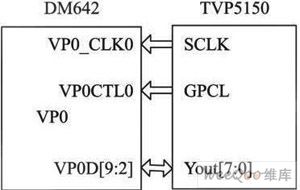
圖2 視頻采集硬件框圖。
2. 2 音頻信號的采集
圖3為音頻輸入框圖, BCLK 為位時鐘, LRC IN和LRCOUT分別為幀同步輸入、輸出, D IN 和DOU分別為音頻輸入、輸出。McASP同時接入4路音頻輸入和輸出, 系統中將McASP設置為突發幀同步模式。TLC320A IC23B 為音頻編碼器件, 支持麥克風、立體聲輸入和立體聲輸出, 根據G. 723 編碼的要求, 話筒輸入的電信號通過TLC320A IC23B進行8 K采樣, 16比特量化。TLC320A IC23B 采用DSP模式與M cASP交換數據。
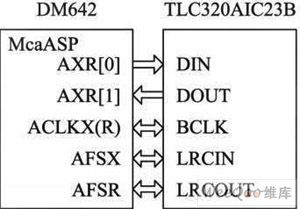
圖3 音頻采集硬件框圖。
2. 3 GPS信號的采集
圖4為GPS信號采集框圖, TX 和RX分別是串行數據發、收信號。TL16C752B 采用8位異步步行存儲器接口, 支持的波特率最高可達到1 Mbyte / s,與DM642的外部存儲器EM IFA 連接, 地址A 2 A0用于對TL16C752B 的8 個寄存器尋址。MAX3160是多協議收發器, 可以將串口接口電平配置為RS232 /RS422 /RS485 等多種接口電平標準。GPS采集模塊采用Ho lux M - 89, 它的靈敏度為159 dBm, 支援NMEA0183數據通訊協定,其定位精度小于3 m, 高于S iRF芯片, 因此除了能很好完成高速移動定位,更適合做步行等低速定位。

圖4 GPS采集硬件框圖。
2. 4 網絡數據的傳輸
網絡數據傳輸連接圖如圖5所示。DM642的網絡接口是與PCI、HPI復用的, 系統中通過PCI總線的B3和B10配置為HPI16+ 以太網接口。以太網接口由EMAC(網絡的數據通路)和MD IO( EMAC的狀態和控制接口)兩部分組成。系統中采用Broadcom 公司的BCM5221作為10 /100M 以太網的收發器(物理層)。
為實現無線網絡傳輸, 采用了3G路由器和無線網卡通過EVDO 網絡傳輸數據。3G 路由器采用Tenda 的3G611R, 該路由器兼容EVDO、HSPA、TD HSDPA三種3G網絡。無線網卡采用中興的AC2746, 該卡支持下行3. 1Mb it / s, 上行1. 8Mbit / s速率。
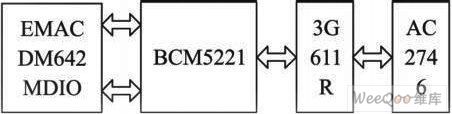
圖5 網絡傳輸硬件框圖
3 系統軟件設計
3. 1 總體流程圖
圖6為系統軟件流程圖。為了實現網絡的實時傳輸且保證后期的定位視音頻處理, 系統中采用了G. 723. 1音頻壓縮編碼、H. 264視頻壓縮編碼, GPS數據僅保留經度、緯度、時間和高程四項數據以用于后期處理。由于G. 723的編碼是每30 ms一幀, 為實現視音頻和定位信息的同步, GPS間隔也設置為30 ms, 而實際的GPS 刷新速率為1次/ s, 因此需要通過經緯度內插的方式進行GPS 定位信息與視頻圖像的匹配。為壓縮視頻速率實現無線實時播放且實現視音頻的同步, 視頻編碼設置為90m s一幀, 視音頻編碼的對應關系為1:3。

圖6 系統軟件流程圖
3. 2 GPS數據的采集
系統中采用查詢方式讀取TL16C752B 中的GPS數據, 由于GPS數據是循環不間斷發送, 軟件設計時利用了TL16C752B 緩存資源,采用了間斷提取的方案以減小對DM642的占用。由于GPS數據傳輸速率設置為4 800 Baud, TL16C752B 的緩存為64字節, 因此只要以小于133ms的時間間隔去讀取TL16C752B中的GPS數據, 總能避免GPS 數據的覆蓋。由于編碼3幀G. 723. 1音頻的時間為90ms, 小于133ms, 因此每90ms讀取GPS數據1次, 讀取11~ 12次后就可以完整的讀完一組GPS數據。
3. 3 音視頻數據的采集和編碼
音頻數據的采集由M cASP完成, 將采集緩存長度設置為480字節, 采集速率設置為8 kHz, 量化比特數設置為16 bi,t 則每30 ms將會返回一個采集緩存滿的標志, 通過查詢讀取該標志可以實現音頻數據的無丟失采集。視頻數據的采集由EDMA 完成,發送視頻采集指令后,由EDMA 完成將視頻采集的原始視頻數據搬移到指定內存。因此視音頻數據的采集都不會占用DM642 的資源。G. 723. 1 的音頻編解碼是將ITU T 的參考程序移植并優化使用,經測試優化后的G. 723. 1的編碼時間小于5ms。
H264的視頻編碼采用Seed公司的H264庫, 該庫支持C IF( 352* 288) 100 kb it / s到800 kbit / s的編碼速率, D1( 704* 576) 500 kbit/ s到4 000 kbit/ s的編碼速率。程序中, 硬盤存儲采用D1、2. 4M 編碼,網絡傳輸采用C IF、300 kbit/ s編碼, 經測試CIF 編碼時間小于5m s, D1編碼時間小于11m s。
3. 4 硬盤數據存儲
系統中采用的硬盤操作方式是直接輸入輸出方式( PIO), 為了防止每幀存盤占用過長的系統時間, 因此存盤任務采取了存盤緩沖的方案, 當緩沖區數據足夠大時, 方進行硬盤操作。為防止硬盤文件過大, 超出了FAT32的存儲范圍(小于4 Gbyte), 采取了當存盤文件大于800MB時, 重建一個序號相連的文件的方案。經測試硬盤讀寫速度最高可達到11. 8Mbyte / s, 因此完全可以滿足系統存儲速度約為3Mbyte / s的要求。
3. 5.網絡數據傳輸
系統中的網絡操作采用T I公司的NDK 庫,該庫支持TCP、UDP、HTTP等常見的網絡協議。該庫的處理能力為每b it / s需要1. 66 個處理周期, 以300 kb it / s的平均傳輸速率計算, 每幀需要492 k個處理周期, 系統中DM642 運行速率為600 MH z, 則平均每幀發送時間為0. 82 ms。為了實現實時播放, 系統中以UTP 協議傳輸編碼后的數據, TCP 協議傳輸網絡控制指令。
4 測試結果和結論
圖7為車載環境下的實時傳輸到服務器并顯示的結果圖。系統測試采用了步行和車載兩種模式, 步行路線為南京師范大學1號門到3號門, 步行速度為5 km /h, 車載路線為南京師范大學1號門到中北校區, 車載速度為60~ 80 km /h, 網絡傳輸采用江蘇電信的EVDO網絡。通過測試證明了該采集器能很好的采集存儲定位視音頻數據, 在步行和車載環境下能通過EVDO網絡傳輸的實時傳輸定位視音頻數據。
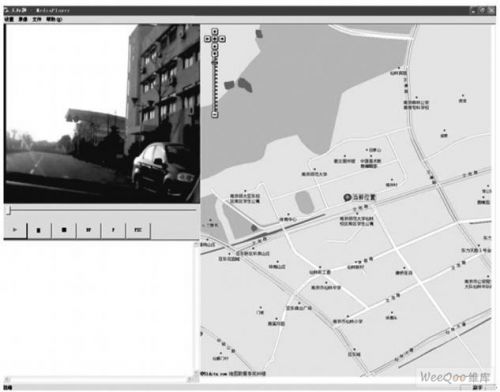
圖7 測試結果圖
本采集器實現了定位視音頻的網絡直播, 提供一個更豐富及時的地理信息系統環境。除此外本采集器的采集數據可以為實景地圖和3D 場景地圖的構建提供素材, 還可以實現基于地理定位信息的視音頻分割和檢索, 將極大的豐富地理信息系統的應用。













評論