基于Cerebot 32MX4 Board的高速公路能見度預警系統設計

一、設計摘要:
大氣中包含空氣分子、凝結核、煙塵、霧以及雪花等降水粒子單元,這些大大小小的粒子包括水或霧等對陽光與天氣的散射是決定大氣透明度最重要的因素。所謂大氣散射是入射的光波遇到大氣里大小不等的粒子,這些粒子將入射光波的一部分“攔截”下來,使這些光波改變方向并以粒子為核心按一定的規律向四周發射出去,其結果顯然是使原來入射方向的光強減弱。沿水平方向觀察遠處目標物時,將受到太陽的直射光,天空云層以及地面的漫射光影響,它們被大氣層的氣溶膠粒子散射,使觀察者感到大氣中好象是有一層遮幕,降低了目標物和背靜間的對比,從而減少了觀察者能看見目標物的距離。這就使我們能夠觀測到物體的視距出現了遠和近的變化,從而形成了能見度。
能見度的概念最早來源于氣象部門,所以在沒有特殊說明的情況下,通常所稱的能見度就是指氣象能見度。能見度通常是視力正常的人在白天無云的天空背景下能夠辨認出一個視角為0.50~5。的黑色目標物體輪廓和形體的最大距離。在夜間則是在黑色背景下能夠辨認出一定強度的燈光的最大距離。從上述定義可以知道能見度取決于人眼的生理特性,目標物和背景的光學性質,以及人與目標物間的大氣的物理性質。
在我國高速公路在促進國民經濟快速發展的同時,不斷攀升的高速公路交通事故發生率和死亡率也給經濟的高速發展、社會的持續穩定和人民的生命財產安全帶來了諸多的不利影響。高速公路本以高速、便捷、高容量及高安全性著稱,一般發達國家的高速公路的交通事故總數和死亡率只有普通公路的1/3到1/2。但在我國由于高速公路由于發展較晚,相關安全和預警措施不完善等原因,致使我國高速公路的交通事故的發生率比普通公路高2到3倍。據公安部網站消息,2008年,全國共發生交通事故265204起,造成73484人死亡、304919人受傷,直接財產損失10.1億元。據統計,在所有高速公路的交通事故中,因雨霧等惡劣天氣影響造成的交通事故就占1/4左右,霧天高速公路地事故率時平常地10倍。就是說低能見度環境是造成高速公路交通事故的一個非常重要的因素。因此,對高速公路沿線的天氣尤其是能見度情況進行全程全天候的實時監控,隨時預警低能見度特別是隨機霧團、瞬時雨雪、沙塵等短時低能見度天氣,對交通運輸有著非常重要的意義。
本系統利用光的折射原理,發射近紅外光并接收其在環境中的折射光,對比前后兩次的光能量的大小來得出能見度。該設備結合近紅外光發生設備,多種傳感器,語音及LCD顯示設備,主要處理控制部分應用Microchip公司生產的高性能MIPS核MCU--PIC32MX460F512L開發板Cerebot 32MX4 Board作為主控板,AD采樣芯片完成數模信號的轉換,并運用無線傳輸模塊傳遞數據,可實現遠距離對系統的控制。
本系統的設計是對當前高速公路交通問題的一大改進,目的是研究并設計一種具有成本較低,適于大規模生產,有廣闊的市場前景的高速公路能見度預警系統。
二、系統原理和創新設計:
系統應用Microchip公司提供的80 MHz 32位MIPS處理器,以及豐富的外圍設備,如:16通道,10位,500ksps A/D變頻器,完成電信號的分析,濾波,提取等處理工作,得出能見度的大小,并控制語音芯片進行語音提示,驅動LCD進行顯示,且將處理結果通過無線模塊傳輸給終端主機做記錄處理,到達實時能見度檢測的效果。
整個設備主要有近紅外光發射端、接收端、無線傳輸模塊、電源模塊、MIPS處理器控制模塊五部分組成,下面分別對各部分的設計進行詳細介紹:
1. 近紅外光發射端設計
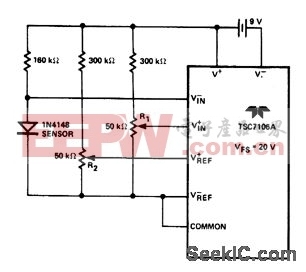
為了使近紅外光正常發射,避免受到霧氣、雨雪對端口的影響(如:浸濕透鏡,結冰霜等)需要對發射端處進行實時的溫度監控,并需安裝加熱裝置對其進行溫度調節,去除水汽。在此我們采用單線數字溫度計DS18B20來實時采集發射端口處溫度,降低成本我們采用電阻式加熱器調控溫度。
DS18B20 單總線數字溫度計特性如下:
(1) 可用數據線供電,電壓范圍:3.0~5.5V;
(2) 測溫范圍:-55~+125℃,在-10~+85℃時精度為±0.5℃;
(3) 可編程的分辨率為9~12位,對應的可分辨溫度分別為0.5℃、0.25℃、0.125℃和0.0625℃;
(4) 12位分辨率時最多在750ms內把溫度值轉換為數字;
(5) 負壓特性:電源極性接反時,溫度計不會發熱燒毀,但不能正常工作。
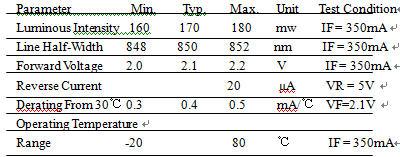
光源的選擇要求有多方面優勢:發光功率大、使用壽命長、發光效率高、穩定性好、光譜分布范圍窄、發光面積小等特點,綜合各方面的考慮,我們選擇了 GT-P03IR4101 型近紅外發光二極管作為光源。具體參數如下:
2. 近紅外光接收端設計
接收端主要由光電轉換、增益控制、溫度檢測、A/D采樣等部分組成,為提高系統的抗干擾性消除環境光的影響,在透鏡之前加上一塊通帶中心波長與發射器發出紅外光中心波長相同的窄帶紅外濾鏡。各部分暫定設備如下:

光電轉換部分采用常用的 BPW76 型硅光電三極管,其靈敏度高,達到設計要求。用單芯片光電轉換放大器 OPT10對轉換后的電信號進行放大處理;在最終進行AD采樣前,先進行硬件濾波,去除系統可能引進的50Hz工頻干擾。溫度采集和控制采用跟接收端相同的設備。
3. 無線傳輸模塊
該模塊采用上海Digilent公司的PmodRF1無線電收發器,它能夠有選擇的在以下區域內進行配置操作:北美ISM頻段的902MHz到928MHz、歐洲SRD頻段的863MHz到870MHz或中國WPAN頻段的779MHz到787MHz。這樣可以確保來自世界各地的用戶,放心安全的將其應用于無線通信的項目中。 該PmodRF1集成了Atmel AT86RF212,一個功耗低、范圍廣的無線電收發器。且附帶一個6英寸12針下載線,一個6英寸雙6針下載線,一個12針接口和兩個6針接口,方便接入。其具有獨立收發器在6公里范圍內的通信能力,方便將處理好的數據結果傳輸給遠程終端主機進行進一步的分析和控制。

4、電源模塊
為節約能源,達到重復利用,采用鵬輝9V鋰離子電池350mAh 9V鋰充電電池,并用穩壓芯片ASM1117-3.3和ASM1117-5.0獲得3.3V和5.0V的電壓,分別給系統中的數字模塊和模擬電路供電。

5、MIPS處理器控制模塊
此模塊運用Cerebot 32MX4 Board開發板,完成對接收端信號的濾波,發送與接收光能量的計算。
由于在環境關線和白天太陽光中都存在強烈的近紅外光,極易淹沒光電管發射的測試近紅外光有用信號,為了從中提取微弱的折射信號計算接收的光能量,我們采用雙相位鎖相的方法實現,其具體原理如下圖所示:
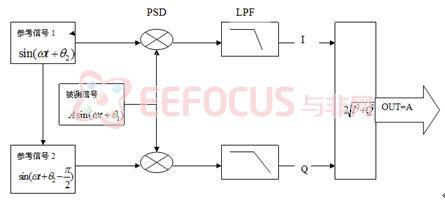
被測信號 Asin(ωt+θ1)分別和兩個與有用信號頻率相同且正交的參考信號sin(ωt+θ2)、sin(ωt+θ2-π/2)相乘,相乘后的信號分別通過兩個數字低通濾波器濾出高頻分量,得到兩個反相的直流分量 Acos(θ1-θ2)/2 、Asin(θ1-2)/2,然后通過運算得到有用信號的幅度和相位:
幅度A=
相位 =
=
從上式的幅度相位我們便可以得出相對于發射端的近紅外光,接收端的紅外光的能量衰減多少,對比得出能見度的大小。
其中參考信號由C語言查找表方式產生,低通濾波器(LPF)則采用有限長數字濾波器(FIR),亦采用C語言實現,其濾波參數可有Matlab設計得出。
三、總系統框圖:
本設計以Cerebot 32MX4 Board開發板完成核心算法和系統控制,整體系統框圖如下所示:
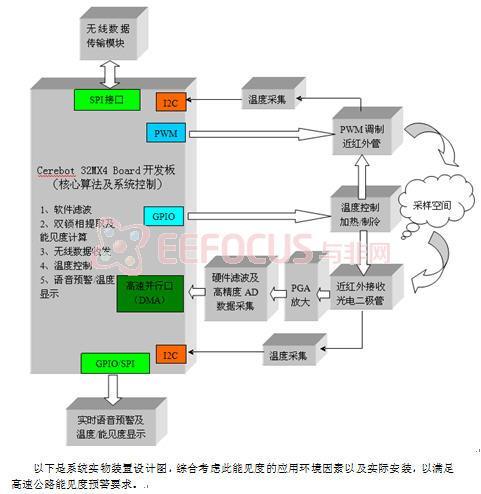
以下是系統實物裝置設計圖,綜合考慮此能見度的應用環境因素以及實際安裝,以滿足高速公路能見度預警要求。
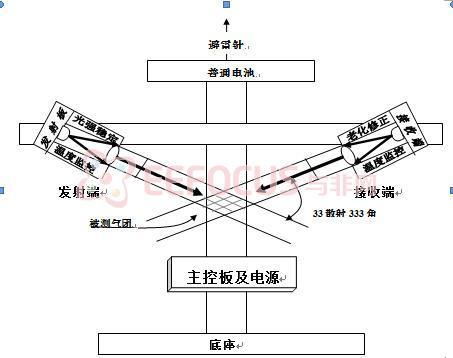
能見度測量儀的整體框圖如上圖所示。它主要由發射端、接收端和信號控制處理器組成。發射端和接收端被分別安裝在1m長的橫梁兩端并保持水平,為了保持散射角為33°、防止太陽光的直射以及雨水的侵蝕,安裝時使發射端和接收端都與水平橫梁成16.5°角。工作時,由發射端發出一束頻率較低的光脈沖,發射光經過大氣的散射后,由安裝在散射角為33°方向上的接收端接收,在通過自動增益控制電路將信號放大到適當倍數,然后通過A/D轉換芯片將其轉換為數字信號,并有信號控制處理器通過相關檢測手段在得到的數字信號中將散射信號檢測出來,最后通過前向散射法能見度測量的理論公式計算得到相應的氣象能見度。
由于散射信號先對入射光強度十分微弱,要準確測量散射光的強度就要對系統各個部分提出嚴格的要求:
◆ 發射端:保證所發射紅外脈沖強度的穩定和脈沖頻率的單一性。
◆接收端:保證自動增益電路的穩定、快速運行,即保證在散射光的強度變化時快速調節放大倍數,使A/D芯片得到的信號強度始終在一個合適范圍內。
◆信號控制處理器:保證強噪聲背景下準確檢測到散射信號。
◆透鏡:保證發射端和接收端的聚光透鏡上沒有結霜結冰,保證實時檢測鏡頭污染情況并對其作出處理。
◆系統:保證系統工作在一個相當恒定的溫度下。
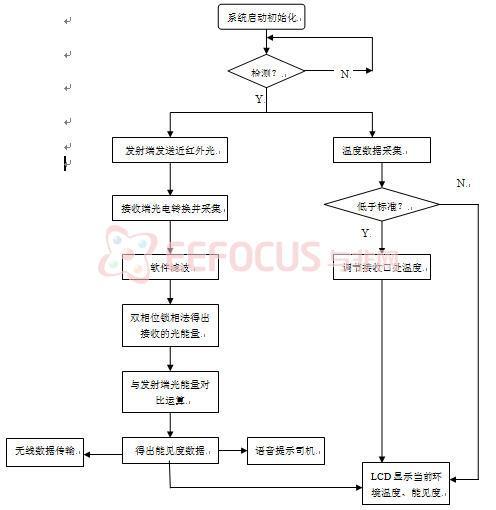
四、軟件流程圖
首先系統啟動后進行初始化,然后判斷系統是否已經開始進行檢測,沒有開始則繼續等待,開始則進行兩項操作:1、發射端發送紅外光,紅外光通過散射由接收端接收到后進行光電轉換并采集,經過軟件的濾波與算法處理后,將能見度數據一方面通過射頻模塊傳給終端控制臺,另一方面對司機進行語音提示。2、溫度傳感器采集數據,判斷溫度是否低于標準,若低于標準溫度則進行調節,同時將溫度顯示在LCD顯示器上,若高于標準溫度則只進行顯示。



評論