肌電生物反饋法康復治療儀的設計

設計并研發一種通過肌電生物反饋法重建人體神經網絡系統的醫療儀器,為神經肌肉系統類疾病患者的全面康復提供一種新的治療平臺。治療儀由硬件電路和PC機控制軟件兩部分構成,下位機(MCU)包括體表肌電采集放大電路、神經肌肉電刺激電路兩大部分;上位機(PC)的軟件系統主要負責視覺信號反饋,治療參數控制、病歷登記、信息查詢等功能。治療儀達到了國家的醫用康復治療的各項指標,能夠幫助患者逐步康復,且具有安全、無創、便捷、人機交互能力強等特點。
肌電生物反饋療法是涉及物理醫學、控制學、生理學、解剖學、心理學及康復醫學知識和技術的多學科、綜合應用的新技術。它借助肌電接收設備記錄自主收縮肌肉時的微弱電信號,并以此為源,通過視覺或聽覺通路提供反饋信號。將人們平時不易感知的體內功能變化轉變為可以感知的視聽信號,并讓患者根據這些信號學會自我訓練和調節的治療方法。適用于神經、肌肉損傷性疾病的康復治療,如卒中、脊髓損傷、肌張力高、外周神經損傷、肌肉萎縮,以及高血壓病,神經癥,尿失禁等。
1總體設計
治療儀通過在病人治療部位的肌肉兩端得貼一個電極,能準確檢測出病人己經不足以致使肌肉收縮的肌電信號,利用生物反饋技術將患者意識不到的自身生物信號肌電值,通過視覺和圖形反饋展現在患者面前,讓患者重新感知自身的生理信號和現存的功能。通過治療師現場的正確指導和幫助,運用認知再學習的方法來調動和激發患者的主動參與意識,“喚醒”患者的意志過程,讓患者重新建立積極、主動的認知過程。
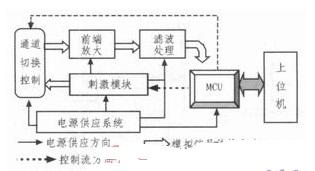
由于貼片電極采集的肌電信號非常微弱,為μV級,系統通過設計合適的前端放大、濾波預處理進行多次放大和多次濾波后傳給MCU.最后,在MCU端使用數字濾波技術進行二次濾波,使肌電信號的顯示更穩定、清晰,以達到0.2μV精度要求。通過以上信號處理后,MCU將所測量到的肌電信號幅度與可調刺激閾值進行比較,由此判定病人的動作意識,當肌電信號幅度超過閾值時,系統發出刺激信號,形成反饋刺激通路,以對病人進行刺激性治療。同時MCU將采集的數據交由上位機進行顯示處理;MCU方保證即時通信,以配合上位機完成各種操作,系統的整個功能框圖如圖1所示。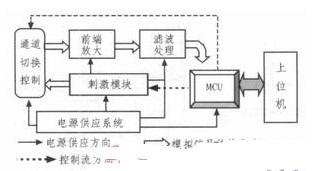
圖1 人體神經網絡康復系統功能框圖
患者可根據自身的肌電信號主動自發地調節設備主參考閾值的高低,當病人能順利的增加其EMG指標達到參考閾值并獲得電流刺激后,系統又會自動調高誘發點,促使病人加大肌肉收縮意識,以引發進一步的肌肉刺激,達到能自主控制肌肉動作。將自發的肌電信號(EMG)和外來的神經肌肉刺激信號(NMES)巧妙地結合起來,將外來的電刺激作用做為一種獎勵溶于患者肌肉的主運動之中,行成一個刺激來自靶細胞的主功閉環反饋刺激通路,讓患者重新學習正確、有效的運動方式,加強或建立病人隨意控制癱瘓的肢體或隨意地控制已破壞的肌肉的殘余功能,從而提高癱瘓肢體的運動功能。
2系統詳細設計
2.1硬件模塊設計
2.1.1前端信號采集
如圖2所示,其中L、R分別為左、右電極,LR為右腿驅動電極。各電極微弱信號經過2個輸入緩沖器,送至威爾遜網絡及放大電路。右腿驅動電路由威爾遜網絡中心點引出,反向放大后送至右腿驅動電極,以中和人體共模信號。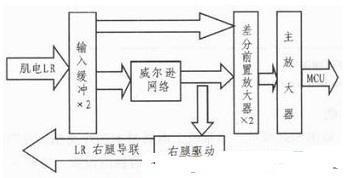
圖2 前端信號采集電路框圖
1)輸入緩沖
輸入緩沖電路的結構為電壓跟隨器,作為人體與威爾遜網絡高度隔離。一方面,極高的輸入阻抗克服了電極與皮膚接觸電阻引起的信號衰減;另一方面,在極低的出阻抗確保可以有效的驅動威爾遜網絡工作。
2)威爾遜網絡及右腿驅動
本系統采用標準的威爾遜網絡技術,將人體上感應的干擾信號,特別是50Hz工頻干擾,傳輸到威爾遜網絡的中心為非中心節點,干擾信號也為相同。實際上,各電極在人上的位置和接觸狀態也存在差異,導聯線的參數和威爾遜網絡的原件值也存在;離散性,故威爾遜網絡的非中心節點上的干擾信號必然有幅度差異甚至相位差。這種差異將以差模方式傳輸到后續放大器被放大。而且,相對于肌電(心電)有用信號而言不能忽視。為此,將威爾遜網絡中心的干擾信號送右腿驅動放大器進行反向放大,傳到右腿驅動電極RF,對人體干擾信號是一種深度反饋,有效的削弱了人體感應的共模信號,經放大器放大。在理想情況下,放大倍數越大,負反饋越深,干擾抑制能力越強。但實際上,人體作為信號傳輸媒體,其傳輸特性不是純阻性,導聯引線也有分布電容,太強的反饋可能在某特定pi頻率上滿足自激條件,使電路不能正常工作。因此,降低Av,使自己的幅度條件得不到滿足為宜。
3)信號放大
由于人體生物電信號十分微弱,噪聲背景強,且信號源阻抗很大,加之測量電極引入極化電壓差較肌電及心電信號大幾百倍,達300 mV左右,必須設計一個性能優良的前端放大器和濾波器電路。前端放大器要采用高輸入阻抗,高共模抑制比,低噪聲,低溫漂,非線性度小,適合的帶寬和動態范圍。因此在本系統中采用AD620,溫漂60,輸入阻抗1 MΩ,非常適合做前端放大器。為防止AD620動態范圍不夠,進入非線性區而失去放大作用,前置放大倍數取6倍,為進一步提高本采集電路的共模抑制比,本系統進一步采用FET高阻抗運放作為輸入端緩沖,以進一步提高本級性能。
2.1.2肌電信號預處理模塊
由于肌電信號作為肌肉點活動在人體體表的表現,信號非常弱,幅度在2μV~4 mV,而且信噪比較低,所以極易受環境的影響。由體表電極檢測到的EMG信號中含有7種不同類型的干擾,即工頻干擾、基線漂移、電極極化噪聲、心電干擾、放大電路內部噪聲和運動的干擾,其中50 Hz及倍頻附近的工頻干擾和0.7 Hz以下的基線漂移是兩個最重要的干擾源。根據相關資料記載,一般正常的肌電信號在10~500Hz頻率范圍內,而90%的EMG頻率能量又集中在250 Hz之間。故可以認為EMG頻率主要分布在20~250 Hz.為了更好的獲得采樣效果,采樣頻帶設置在20 Hz~1 kHz.為了增強肌電信號中的有效成分,抑制噪聲和偽跡,提高波形檢測準確率,目前國內外研究人員提出了許多種處理方案,總體上分為硬件和軟件兩大類。在本治療儀中,我們同時采用了硬件和軟件兩類解決方案。在這里,只討論硬件解決方案,如圖3所示,第一級為截止頻率為20 Hz以下的高通濾波器,第二級為截止頻率為600 Hz以上的低通濾波器,第三級為50 Hz的陷波器。這樣就能很好的保持肌電信號較強的部分,濾去50Hz的工頻干擾。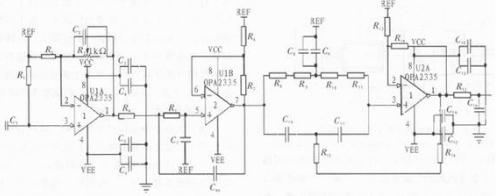
圖3 肌點信號預處理模塊原理圖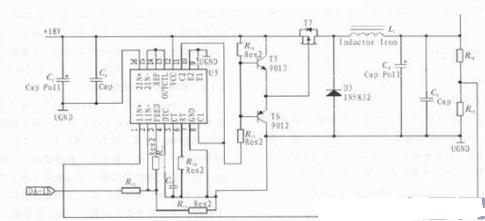
圖4 雙端脈沖調制電路原理圖
2.1.3刺激模塊
本系統將所測量到得肌電信號幅度與可調的刺激閾值進行比較,當肌電信號幅度超過閾值時,由下位機的主控芯片ARM發出刺激控制信號,該控制信號經電壓隔離轉換電路轉換生成(0~2.5 V)的線性電壓,來驅動雙端脈沖調制器獲得刺激電壓,雙端脈沖調制模塊電路如圖4所示。
2.2軟件模塊設計
2.2.1上位機軟件設計
1)功能概述
軟件系統用于PC機與MCU方的通訊,主要是起到視覺信號反饋,治療參數設計,病例登記,信息查詢等功能。向MCU方發送控制指令,顯示MCU方返回的刺激信息,同時具有病人信息的密保功能。上、下位機之間通過標準的RS232串口進行通信,其中,作為主要治療手段的EMG-Triggered-NMES模塊與串口1(COM1)連接。
2)功能模塊設計
系統操作菜單給用戶提供了三項功能人口,系統設置、開始治療、歷史檔案。在進入“歷史檔案”后可以查看數據庫中所有病人的治療記錄,同時可以對病人的記錄做刪除處理。系統設置模塊可以對硬件設備參數進行設置,設置完成后將所設參數通過串口發送給MCU,當MCU方接受到參數數據后,將返回相應的值表示參數已經成功的接受了,否則將返回錯誤信息。開始治療模塊可以添加病人的一系列個人
資料,其中“病歷號”,“姓名”是個人信息的必填項目,同時“病歷號”不允許與系統數據庫中已有的病例號重復,右側設置病人治療的參數,通過串口想數據發送到MCU方。保存啟動模塊進行主波形顯示,顯示患者的自發EMG訊號。
2.2.2 MCU方軟件設計
本系統中所選用Aduc7026是美國ANALOG DEVICES公司新設計生產的基于ARM7內核的高速處理器,其內部自帶12位分辨率AD轉換器、12位高精度DA轉換器,串口等多種功能。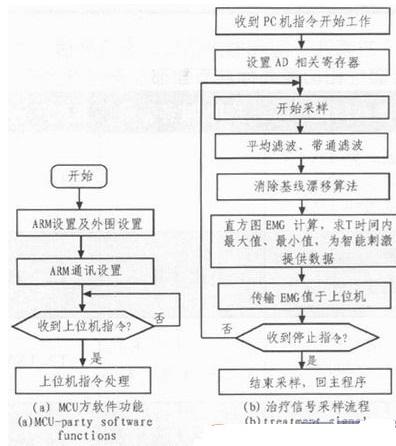
圖5 MCU方主要功能模塊流程圖
如圖5(a)所示,當系統上電后對本芯片及相關外圍設備進行初始化,初始化內容包括核心時鐘的設置、ADC采樣、串口通信、LED指示管腳和控制管腳等設置。完成系統初始化等工作后等待上位機指令,當得到上位機指令后進行相應操作。由于ADC采樣前需要至少5μs的上電時間,所以設置完ADC控制寄存器后,需要等待5μs的時間。本系統中采用while循環語句200次,經過試驗,發現延長等待時間能使AD更可靠復位,因此,在本系統中循環20 000次。由于通過前級模擬電路調理電路,差模方式輸入信號已轉成單端電壓信號,在這里AD選擇工作于單端模式、ADC通道4、ADc時鐘頻率fADC/2、選擇內部參考電壓2.5 V、觸發方式Timer0觸發、捕獲時間2clock,并設制Timer0相關的寄存器進行設置。串口通信需要定義兩個部分,一是用于通信的管腳,出于對布線的考慮,選用了串口通信的模式2,即P0.7和P2.0口用于收發數據,二是波特率的設定為9 600 bps,設置DLAB值為:cOMCONO=0x80.通過這些設制后,系統進入正常工作模式,等待上位機指令。當收到上位機開始治療指令后單位機進入EMG測量及刺激程序,如圖5(b)所示,系統進入測量、治療模式。
3結論
本系統可以準確地捕捉到人體的表面肌電信號,并能清晰地反映出肌肉收縮程度,有助于患者根據這些信號進行自我訓練和調節;本系統的前端信號采集放大電路具有高共模抑制比,對100 Hz以下的信號共模抑制比CMRR達到100 dB,肌電信號預處理模塊設計使肌電信號較強的部分得到很好的保持,并濾去50 Hz的工頻干擾。
系統采用ARM內核的高速處理器,內部自帶12位分辨率AD轉換器、12位高精度DA轉換器,肌電信號采集精度高,主要由EMG-Triggered-NMES模塊通過RS232串口方式進行數據傳輸,實現EMG測量及刺激治療。
該康復治療儀體積小、接口簡單、使用方便,適應癥:1)腦血管病引起的癱瘓;2)顱腦外傷及神經外科手術后建留的運動功能障礙;3)周圍神經系統受損引起的肌肉萎縮、運動功能障礙、廢用性肌無力;4)神經癥導致的運動功能降低患者。

評論