ARM7單片機(學習ing)—(一)、輸入/輸出端口GPIO編程—01

一、輸入/輸出端口GPIO編程
本文引用地址:http://www.104case.com/article/201705/358654.htm一—(01)、一位數碼管靜態顯示(通過74HC595實現)
1、管腳連接模塊
首先介紹一下LPC2106的相關的管腳~~
特性:可以實現獨立的管腳配置
應用:管腳連接模塊的用途是將管腳配置為需要的功能(這一章節主要就是介紹GPIO功能~~別的會在接下來的章節中分別予以介紹~~)
描述:管腳連接模塊可以使所選管腳具有一個以上的功能。配置寄存器控制多路開關來連接管腳與片內外設。外設在激活和任何相關只讀使能之前必須連接到適當的管腳。任何使能的外設功能如果沒有映射到相應的管腳,則被認為是無效的。
寄存器的描述:
管腳連接模塊包括兩個寄存器:

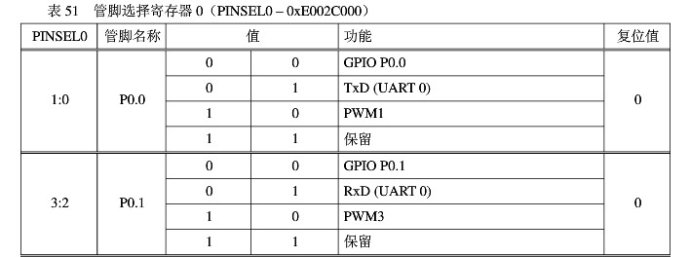
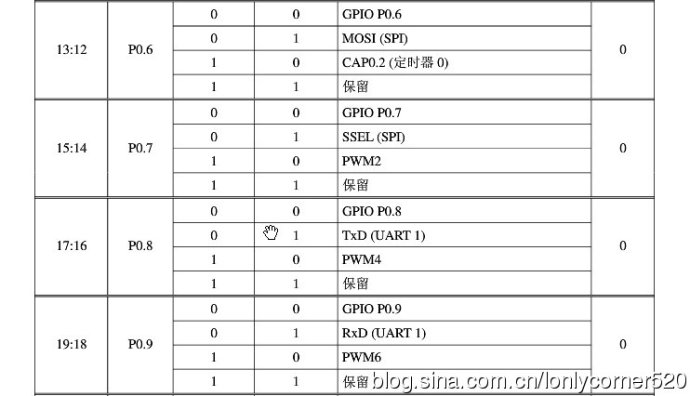
管腳功能寄存器0:(PINSEL0)
PINSEL0寄存器按照下表當中的設定來控制管腳的功能。
IODIR寄存器中的方向控制位只有在管腳選擇為GPIO的功能時才有效(也就是本章要講述的)。對于其它功能,方向是自動控制的。



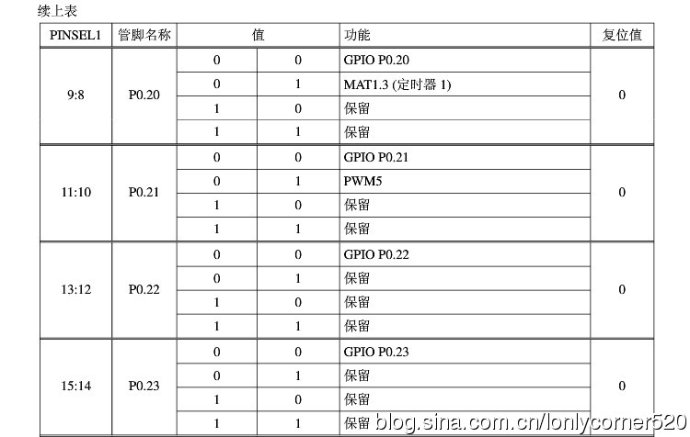
管腳功能寄存器1:(PINSEL1)
PINSEL1寄存器按照下表來設定控制管腳的功能。
IODIR寄存器中的方向控制位只有在管腳選擇GPIO功能時才有效。對于其它功能,方向是自動控制的。
在復位時拉低DBGSEL時,只要管腳P0.17-P0.31的功能控制有效。(這個還真的不知道哎~~




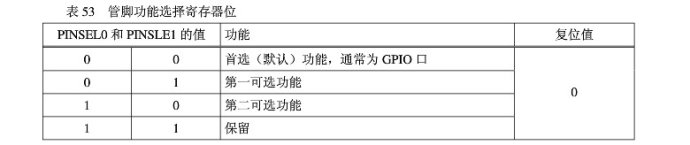
管腳功能寄存器值:
PINSEL寄存器控制器件管腳的功能。如下圖。
每一對寄存器位對應一個特定的器件管腳。
只有當管腳選擇為GPIO功能時,IODIR寄存器的方向控制位才有效。
其它功能的方向是自動控制的。
每個派生期間通常具有不同的管腳分布,因此每個管腳可能有不同的功能。
2、GPIO
特性:
1)單個位的方向控制
2)單獨控制輸出的置位和清零
3)所有I/0口在復位后默認為輸入
應用:
1)通用I/0口
2)驅動LED或者其他指示器
3)驅動片外器件
4)檢測數字輸入
管腳描述:

寄存器描述:
GPIO包含4個寄存器,如下表:

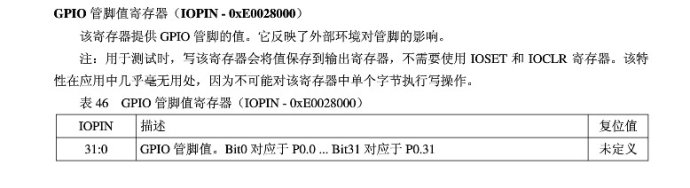
GPIO引腳值寄存器IOPIN:
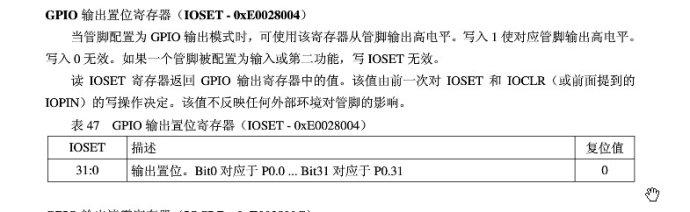
GPIO輸出置位寄存器IOSET:
GPIO輸出清零寄存器:

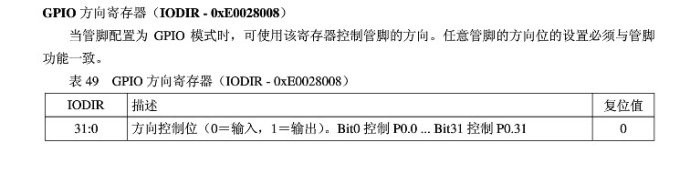
GPIO方向寄存器:

好了,就這么點吧~~
然后就是今天要做的實驗:
一位數碼管的靜態顯示
暈了~~用IAR for ARM就是調不好~~
shit~~
然后就換用了Keil~~
浪費我大把時間了~~
早知道就早用Keil了~~
回頭還得再調試一下IAR~~
好了,發圖~~
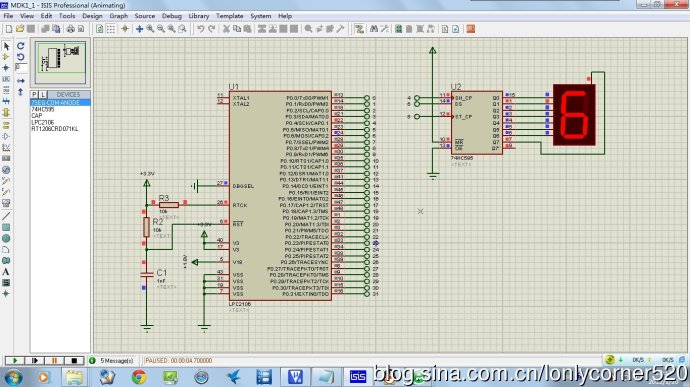
然后就是程序了~~
MDK1_1.c(先是主程序嗎~~你懂得)
//------------------------------------------------------------------------------
//LED數碼管顯示
//通過I/O模擬同步串行接口與74HC595進行連接,控制74HC595驅動LED數碼管顯示
//------------------------------------------------------------------------------
#include"lpc210x.h"
typedef unsigned long uint32;
typedef unsigned char uchar;
#define SPI_IO 0x00000150 //SPI接口的I/O設置字
uchar const seg[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0.82,0xf8,
0x80,0x90,0x88,0x83,0xc6,0xa1,0x86,0x8e};
//------------------------------------------------------------------------------
//延時函數
void delay(uint32 z)
{
uint32 i;
for(;z>0;z--)
for(i=0;i<50000;i++);
}
//------------------------------------------------------------------------------
//main
int main()
{
uchar i;
PINSEL0=0X00000000;
PINSEL1=0X00000000; //設置左右引腳連接GPIO
IODIR=SPI_IO; //設置SPI控制口為輸出~~由于這是模擬的,所以需要自己設置方向位
while(1)
{
for(i=0;i<16;i++)
{
HC595_send_data(seg[i]);
delay(1);
}
}
}
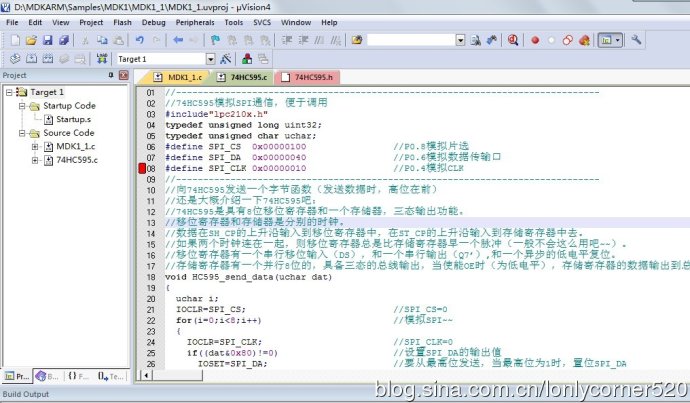
74HC595.c
//------------------------------------------------------------------------------
//74HC595模擬SPI通信,便于調用
#include"lpc210x.h"
typedef unsigned long uint32;
typedef unsigned char uchar;
#define SPI_CS 0x00000100 //P0.8模擬片選
#define SPI_DA 0x00000040 //P0.6模擬數據傳輸口
#define SPI_CLK 0x00000010 //P0.4模擬CLK
//------------------------------------------------------------------------------
//向74HC595發送一個字節函數(發送數據時,高位在前)
//還是大概介紹一下74HC595吧:
//74HC595是具有8位移位寄存器和一個存儲器,三態輸出功能。
//移位寄存器和存儲器是分別的時鐘。
//數據在SH_CP的上升沿輸入到移位寄存器中,在ST_CP的上升沿輸入到存儲寄存器中去。
//如果兩個時鐘連在一起,則移位寄存器總是比存儲寄存器早一個脈沖(一般不會這么用吧~~)。
//移位寄存器有一個串行移位輸入(DS),和一個串行輸出(Q7’),和一個異步的低電平復位。
//存儲寄存器有一個并行8位的,具備三態的總線輸出,當使能OE時(為低電平),存儲寄存器的數據輸出到總線。
void HC595_send_data(uchar dat)
{
uchar i;
IOCLR=SPI_CS; //SPI_CS=0
for(i=0;i<8;i++) //模擬SPI~~
{
IOCLR=SPI_CLK; //SPI_CLK=0
if((dat&0x80)!=0) //設置SPI_DA的輸出值
IOSET=SPI_DA; //要從最高位發送,當最高位為1時,置位SPI_DA
else
IOCLR=SPI_DA; //當最高位為0時,清零SPI_DA
dat<<=1; //dat循環左移一位
IOSET=SPI_CLK; //SPI_CLK為1,一個脈沖上升沿,將數據移入移位寄存器
}
IOSET=SPI_CS; //SPI_CS=1,輸入到存儲寄存器中,由于片選一直為低,所以直接就輸出顯示的數據
}






評論