利用Xilinx FPGA和分解器數字轉換器簡化角度測量

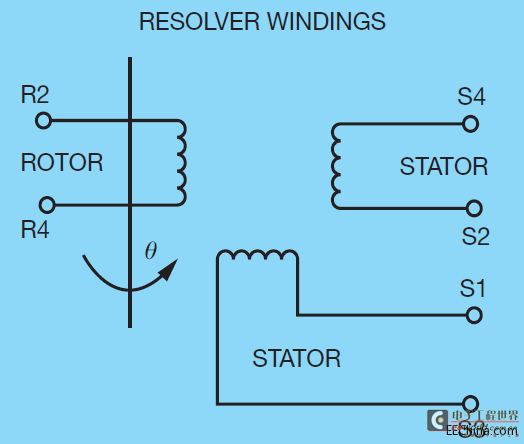
分解器的定子輸出電壓為:
V1= V sinωt sinθ方程1
V2= V sinωt cosθ方程2
其中θ是分解器轉子的角度。數字角度ψ應用到余弦乘法器,其余弦乘以V1得出下式:
V sinωt sinθ cosψ 方程3
數字角度ψ另外還應用到正弦乘法器,乘以V2得出下式:
V sinωt cosθ sinψ 方程4
這兩個信號由誤差放大器相減求得出波形的誤差信號:
(V sinωt sinθcosψ – V sinωt cosθ sinψ) 方程5
V sinωt (sinθ cosψ- cosθ sinψ) 方程6
根據三角恒等式,其簡化為:
V sinωt [sin (θ -ψ)] 方程7
本文引用地址:http://www.104case.com/article/201702/338336.htm

圖3 – SD-14620方框圖(單信道)
圖中文字如下:
REFERENCE CONDITIONER:基準調節器
BIT DETECTOR:位檢測器
“S” OPTION SYNTHESIZED REFERENCE:“S”選項綜合基準
INPUT OPTION:輸入選項
CONTROL TRANSFORMER:控制變壓器
GAIN:增益
DEMODULATOR:解調器
HYSTERESIS:滯后
INTEGRATOR:積分器
DC/DC CONVERTER:DC/DC轉換器
14/16 BIT UP/DOWN COUNTER:14/16位遞增/遞減計數器
VCO & TIMING:VCO與時序
DATA LATCHES:數據鎖存器
FILTER:濾波器
47μf external capacitor:47μf外部電容
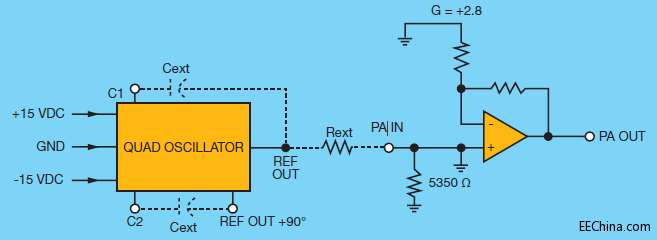
圖4 – OSC-15802基準振蕩器方框圖
圖中文字如下:
QUAD OSCILLATOR:四線組振蕩器
檢測器采用分解器的轉子電壓作為基準同步解調此AC誤差信號。這會產生與sin (θ -ψ)成正比的DC誤差信號。
DC誤差信號饋送到積分器,其輸出驅動一個由電壓控制的振蕩器。而VCO會導致遞增/遞減計數器按正確方向計數,從而在一次計數中產生:
sin (θ -ψ)→0方程8
當取得此結果,則:
θ -ψ→0 方程9
因此,
θ = ψ 方程10
因此,計數器的數字輸出ψ代表著角度θ。鎖存器可以在不中斷回路跟蹤情況下實現此數據向外部的傳輸。
此電路等效于2型伺服回路,因為它實際上有兩個積分器。一個是累計脈沖的計數器;另一個是位于檢測器輸出端的積分器。在具有恒定旋轉速度輸入的2型伺服回路中,輸出數字字連續跟隨或跟蹤該輸入,而無需外部導出轉換。
RDC典型實例:SD-14621
SD-14621是數據設備公司(DDC)生產的小型低成本RDC。它有兩條具備可編程分辨率控制功能的信道。分辨率編程功能允許選擇10、12、14或16位模式[4]。此功能允許低分辨率高速跟蹤或者更高分辨率支持更高精度。由于其大小、成本、精度與多功能性,此轉換器適用于高性能軍用、商用及位置控制系統。
器件的運行需要一個+5V電壓。轉換器有兩個對模擬地為±4V電壓范圍的速度輸出(VEL A、VEL B),可用于替代轉速計。為兩條信道(/BIT A與/BIT B)提供兩個內置測試輸出,以指示信號丟失(LOS)。
此轉換器由三大部分組成:輸入前端、誤差處理器和數字接口。前端對于同步器、分解器和直接輸入端有所不同。電子Scott-T用于同步器輸入,分解器調節器用于分解器輸入,而正弦與余弦電壓跟隨器用于直接輸入端。這些放大器可以饋送高精度控制變壓器(CT)。CT的另一個輸入是16位數字角度ψ,其輸出是兩個輸入之間的模擬誤差角度或差分角度。CT采用放大器、交換機、邏輯電路與電容器以查準率執行SINθ COSψ - COSθ SINψ = Sin(θ-ψ)的三角函數計算。
與常規精密電阻器相比,這些電容器按查準率使用,以獲得更高精度。另外,這些電容器(與運算放大器一起用作計算元件)進行高速采樣,以消除偏移和運算放大器偏差。
DC誤差處理進行積分運算,然后得到驅動電壓控制振蕩器的速度電壓。此VCO與速度積分器結合在一起構成遞增積分器:一種2型伺服反饋回路。
基準振蕩器
我們設計中采用的OSC-15802功耗振蕩器也是DDC公司提供。此器件適用于RDC、同步器、LVDT和感應式傳感器應用[5]。頻率與振幅輸出可以分別由電容器和電阻器編程。輸出頻率范圍介于400Hz~10kHz之間,輸出電壓為7Vrms。圖4顯示了器件的方框圖。
饋送到分解器和RDC的振蕩器輸出用作基準信號。
FPGA的I/O電壓為3.3V,而RDC的電壓為5V。我們采用電壓收發器實現兩個器件之間的電壓兼容。
VIRTEX-5 FX30T FPGA與RDC接口
我們在設計中采用賽靈思Virtex-5 FX30T FPGA [6]。FPGA的I/O電壓為3.3V,而RDC的電壓為5V。因此我們采用電壓收發器來實現這兩個器件之間的電壓兼容。通過賽靈思提供的GPIO IP核與FPGA建立內部連接,如圖5所示。
為了簡單起見,圖5僅顯示一條具有一個分解器接口的信道。您可以在本文件隨附的賽靈思開發板描述(XBD)文件找到RDC的引腳詳情以及FPGA對應的專用引腳。詳情見該文件第一部分。

評論