示波器的數(shù)字觸發(fā)技術(shù)(下)

3.1實(shí)時(shí)采集中的低觸發(fā)抖動(dòng)
在采集和觸發(fā)過(guò)程中使用相同樣本值,使 R&S 示波器的觸發(fā)抖動(dòng)小于 1ps rms(典型值,最小值可大達(dá)到500ps) 。圖 8 顯示了在觸發(fā)點(diǎn)采用 2GHz 時(shí)鐘信號(hào)(該信號(hào)上升時(shí)間為 400ps)測(cè)定觸發(fā)抖動(dòng)實(shí)例。
正如在第 2-1 節(jié)討論的,R&S 示波器實(shí)時(shí)數(shù)字觸發(fā)單元是在 A/D 轉(zhuǎn)換器和采集存儲(chǔ)器間的處理路徑中實(shí)現(xiàn)的。不同于使用后處理方法實(shí)現(xiàn)的“軟件增強(qiáng)”觸發(fā)系統(tǒng),在采集每個(gè)波形后,R&S 示波器實(shí)時(shí)數(shù)字觸發(fā)單元不需要額外地處理信號(hào),最小化盲區(qū)時(shí)間。RTO示波器首次將最低觸發(fā)抖動(dòng)和每秒1 百萬(wàn)次的波形捕獲率在正常采集模式實(shí)現(xiàn)。
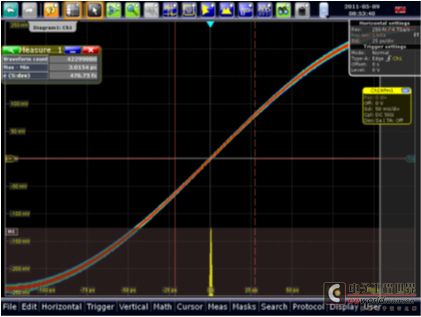
圖 8:采用 2GHz、峰峰值 500mV 正弦波信號(hào)測(cè)定的內(nèi)在觸發(fā)抖動(dòng)
應(yīng)用提示
R&S®RTO 示波器的 OCXO 選件可將時(shí)基精度提高到 ±0.02 ppm。這對(duì)于需要長(zhǎng)存儲(chǔ)采集,高觸發(fā)偏移的采集,或罕見(jiàn)觸發(fā)事件間的時(shí)間關(guān)系應(yīng)用都是十分有效的。
3.2 優(yōu)化觸發(fā)靈敏度
對(duì)于觸發(fā)靈敏度有兩個(gè)相互矛盾的要求:對(duì)于噪聲信號(hào)的穩(wěn)定觸發(fā),要求觸發(fā)系統(tǒng)在觸發(fā)門限周圍實(shí)現(xiàn)一定遲滯(參閱圖 9)。另一方面,對(duì)于小振幅信號(hào),較大的遲滯又會(huì)限制觸發(fā)系統(tǒng)的靈敏度。
傳統(tǒng)示波器的觸發(fā)靈敏度一般限制到一個(gè)垂直刻度以上。此外,對(duì)于噪聲信號(hào)的穩(wěn)定觸發(fā),采用“噪聲抑制”模式可以選擇較大的遲滯。
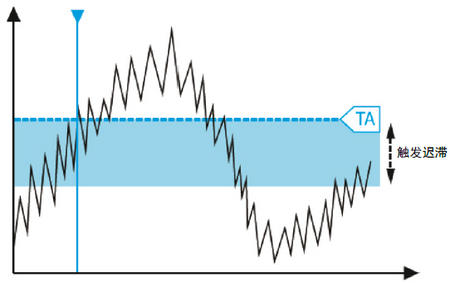
圖 9:觸發(fā)遲滯能夠?qū)崿F(xiàn)對(duì)噪聲信號(hào)的穩(wěn)定觸發(fā)
R&S 的數(shù)字觸發(fā)系統(tǒng)允許從 0 到 5 個(gè)格的特殊觸發(fā)遲滯設(shè)置,以便根據(jù)圖 10 中的相應(yīng)信號(hào)特征優(yōu)化觸發(fā)靈敏度。
• 采用“Auto”遲滯模式,R&S 的固件根據(jù)使用的垂直刻度自動(dòng)確定相關(guān)遲滯。
•“Manual”遲滯模式支持手動(dòng)增大遲滯,以便對(duì)具有高噪聲電平的信號(hào)進(jìn)行穩(wěn)定觸發(fā)(參閱圖 9)
• 將遲滯設(shè)置為 0 可以為快速邊沿信號(hào)提供最高的觸發(fā)靈敏度。
提到觸發(fā)靈敏度,我們就不得不提到 R&S 示波器的另一個(gè)優(yōu)點(diǎn):即使在最小的1mV/div垂直刻度下,低噪聲前端也可以保證精確觸發(fā),且沒(méi)有帶寬限制。
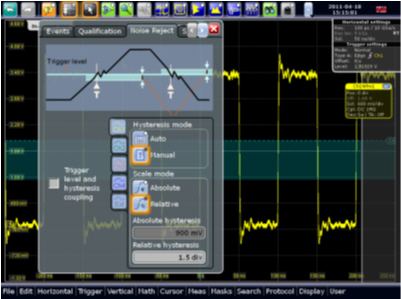
圖 10:RTO 觸發(fā)門限遲滯可以自由設(shè)定。最高靈敏度設(shè)置為 0。
3.3 最小可檢測(cè)脈沖寬度
觸發(fā)系統(tǒng)的另一個(gè)關(guān)鍵參數(shù)是最小可檢測(cè)脈沖寬度。它與示波器能夠檢測(cè)到并產(chǎn)生觸發(fā)的最窄脈沖相對(duì)應(yīng)。R&S 示波器支持對(duì)脈沖、毛刺、間隔和小至50ps 的上升/下降時(shí)間進(jìn)行穩(wěn)定觸發(fā)。
圖 11 顯示了對(duì)小于50ps的脈沖寬度進(jìn)行穩(wěn)定觸發(fā)的例子。在這個(gè)例子中,用帶有過(guò)沖的3.5V TTL電平的脈沖心慌演示 R&S®RTO 的觸發(fā)靈敏度。這個(gè)特例的重要性在于,需要將觸發(fā)遲滯設(shè)置為 0以獲得最小。在圖 11 中,可以看到所有采集的波形都滿足脈沖寬度窄于 50ps 的觸發(fā)條件。
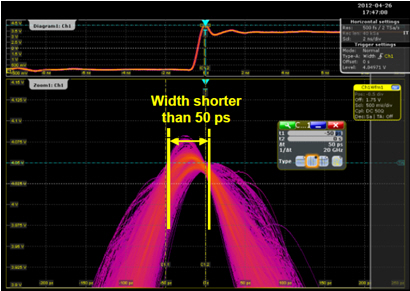
圖 11:采用設(shè)置為窄于50ps 脈沖寬度觸發(fā)
3.4 觸發(fā)事件無(wú)遺漏
觸發(fā)判決后,模擬觸發(fā)電路需要一些時(shí)間,以便在觸發(fā)電路能夠再次觸發(fā)前對(duì)其進(jìn)行重新設(shè)置。在這個(gè)重新設(shè)置期間,示波器不能響應(yīng)新的觸發(fā)事件---即重新設(shè)置期間發(fā)生的觸發(fā)事件被遺漏。
與之不同,R&S 示波器的數(shù)字觸發(fā)系統(tǒng)能夠用時(shí)間數(shù)字轉(zhuǎn)換器 (Time-to-Digital-Converters, TDC) 在 400ps間隔內(nèi)(參閱圖 12),以 250fs 分辨率測(cè)定各個(gè)觸發(fā)事件。這對(duì)于復(fù)雜觸發(fā)條件的應(yīng)用很重要,例如使用事件計(jì)數(shù)條件的觸發(fā)釋抑 (hold-off),或 A-B 觸發(fā)序列,觸發(fā)前需要若干 B 事件。

評(píng)論