示波器基礎原理入門指南(上)

數字示波器的基本元素
每一臺數字示波器都具備四個基本功能模塊 – 垂直系統、水平系統、觸發系統以及顯示系統。為了理解數字示波器的整體功能,理解各個模塊的功能至關重要。
數字示波器前面板的大部分區域均用于控制垂直、水平和觸發功能,因為大部分必需的調節工作都是由這些功能來完成。垂直功能部分通過控件改變“volts per division”(每格電壓值)數值來控制信號的衰減或放大,使信號能夠以適當幅度進行顯示。水平控件與儀器的時基有關,其“每格秒數”控件用于確定顯示屏上水平每格所代表的時間量。觸發系統會執行信號穩定化處理以及示波器初始化等基本功能以進行信號采集,用戶可以選擇并修改具體觸發類型。而最后的顯示系統則包括顯示器本身和顯示驅動器,以及用于執行顯示功能的軟件。
垂直系統
該系統(圖 4)讓用戶能夠垂直定位和縮放波形,選擇輸入耦合方式,以及修改信號特征使其以特定方式顯示在屏幕上。用戶可以將波形垂直放置在顯示屏上的精確位置,并增加或者縮小其大小尺寸。所有示波器的顯示屏幕上均設有柵格,用于將屏幕上的可視區域劃分為 8 個或者 10 個垂直格,每格代表總電壓的一部分。也就是說,對于顯示柵格有 10格的示波器來說,如果總體可顯示的電壓為 50 V,那么每格代表 5 V。
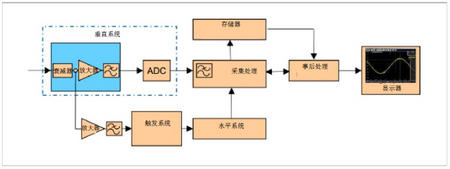
圖 4:垂直系統
8格、10格或者其它一些柵格在選擇上是隨意的,為簡單起見通常會選用 10格:10格比 8格更加容易劃分。探頭也會對顯示比例造成影響,有些探頭不會對信號造成衰減(1X 探頭),有些探頭會有 10 倍衰減功能 (10X 探頭),有些甚至可以達到 1000 倍衰減。探頭的問題會在下文再進行討論。
前面提到的輸入耦合基本上確定了從信號被探頭捕捉,到經過線纜傳入儀器的整個過程的信號傳輸。直流耦合提供 1 M歐姆或者 50 歐姆的輸入耦合阻抗。
選擇 50 歐姆的輸入耦合可以將輸入信號直接發送至示波器的縱向增益放大器,由此可以實現最寬帶寬。選擇交流或者直流耦合模式(對應的 1M 歐姆端子數值)會在縱向增益放大器前方放置一個放大器,通常在所有情況下均將帶寬限制為 500 MHz。如此高阻抗的好處在于提供了內在的高電壓保護。在前面板上選擇“接地”之后,縱向系統會斷開連接,0-V 的點會顯示在屏幕上。
其它與垂直系統相關的電路還包括一個帶寬限制器,用于在對顯示波形進行降噪時衰減高頻信號成分。許多示波器還利用一個 DSP 任意均衡濾波器(抗混疊濾波器)來擴展儀器帶寬,通過調整示波器通道的相位和幅值響應使儀器帶寬超出前端的原始響應。然而,這些電路要求采樣率滿足奈奎斯特定理 —— 采樣率必須大于信號最大基頻的兩倍。為了實現這一點,儀器通常會被鎖定在其最大采樣率,在未禁用濾波器的情況下無法降低采樣率以察看更長的持續時間。
水平系統
相對于垂直系統,水平系統與信號采集更相關,強調采樣率、存儲深度以及其它與數據采集和轉換直接相關的性能指標。
采樣點之間的時間間隔稱為采樣間隔,樣點值代表保存在存儲器中用于產生波形的數值。波形點之間的時間間隔稱為波形間隔,由于一個波形點可能建立在多個采樣點的基礎上,因此兩者是相關的,有時也可能具有相同的數值。
一般示波器的采集模式菜單非常有限,因為一個通道只能產生一個波形,用戶只能選擇一種采樣類型或者一種波形算法類型。但是,某些示波器可以在一個通道上并行顯示三個波形,而且各個波形都可以對采樣類型和波形算法類型進行組合。典型的模式包括:
• 采樣模式:對于每個波形間隔,均由一個采樣點來產生一個波形點。
• 高分辨率模式:對于每個波形間隔,會顯示波形間隔的平均采樣點。
• 峰值檢測模式:對于每個波形間隔,會顯示波形內的最小采樣點和最大采樣點。
• RMS:顯示波形間隔內的采樣點 RMS 值。這與瞬時功率成比例。
典型的波形算法模式包括:
• 包絡模式:基于由至少兩個觸發事件所捕捉的波形,示波器會生成一個邊界(包絡線)來表示波形的最大值和最小值。
• 平均模式:根據多次采樣獲得各個波形間隔樣本的平均值。
觸發系統
觸發器是每個數字示波器的基本單元之一,用于捕捉信號事件進行詳細分析以及提供穩定的重復波形視圖。觸發系統的精度及其靈活性決定了如何顯示以及分析測量信號。如前所述,數字觸發系統在測量精度、采集密度以及功能性方面為示波器用戶帶來顯著的優勢。
模擬觸發
示波器的觸發器(圖 5)確保為重復信號的持續監視提供穩定的波形顯示。作為對特定事件的響應,觸發器在隔離和顯示諸如“矮波”邏輯電平等具體信號特征以及通道之間由串擾、緩慢邊緣或者無效定時所引起的信號干擾時非常有用。觸發類型的數量以及觸發器的靈活性歷年來一直在不斷進步。
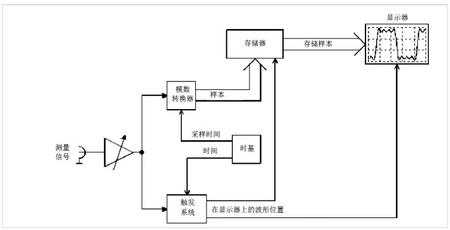
圖 5:模擬觸發系統
“數字”示波器是指對測量信號進行采樣并將其保存為離散數字值的儀器,而一般示波器的觸發系統則一直用于處理原始測量的模擬信號,因此稱之為模擬觸發系統。
輸入放大器對被測信號進行調節,使其幅值與 ADC 和顯示器的工作范圍相匹配,經過調節的信號從放大器輸出之后會并行發送至模-數轉換器 (ADC) 以及觸發系統。
ADC 會通過一條路徑對測量信號進行采樣,數字化的樣本數值會被寫入到采集存儲器當中;而在另一條路徑上,觸發系統會將信號與有效的觸發事件(比如信號跨越了“邊緣”觸發的觸發門限)進行對比。當發生有效的觸發條件時,示波器會最終確定 ADC 的樣本并處理和顯示所需的波形。測量信號一旦跨越觸發電平,便會導致一個有效的觸發事件。然而,為了讓信號能夠在顯示器上準確顯示,必須提供精確的觸發點定時。否則,所顯示的波形將不會與觸發點(觸發電平與觸發位置的交點)重疊。
而這可能由多種因素所導致。首先,觸發系統中的信號會通過比較器與觸發門限進行比較,而比較器輸出端的邊緣時間必須利用時間數字轉換器 (TDC) 進行準確測量。
如果 TDC 的測量結果不準確,那么所顯示的波形與觸發點之間出現偏移,并且每個觸發事件都會改變這一偏移量,導致觸發抖動。
另一個因素是測量信號的兩條路徑中存在誤差源。信號會經過兩條不同的路徑進行處理(ADC 的采集路徑以及觸發系統路徑),兩者均含有不同的線性以及非線性失真。這導致所顯示的信號與確定的觸發點之間存在系統錯配。在最壞的情況中,即便可以在顯示器上看到這些觸發事件,觸發器也將無法對有效的觸發事件作出響應,或者觸發器會對那些采集路徑無法捕捉和顯示的觸發事件作出響應。
最后一個因素是兩條路徑中存在不同的噪聲源,這些噪聲源包括具有不同噪聲等級的放大器。這將引起延遲和幅值差異,表現在顯示屏上就是觸發位置出現偏移(抖動)。而當以數字觸發方式來工作的時候,觸發器將不會出現這些誤差。
數字觸發
與模擬觸發系統相反,數字觸發系統(圖 6)直接對 ADC 所采集的樣本進行操作,信號不會被分離為兩條路徑,而是對所需的同一路信號進行處理并顯示出來。于是,將可從根本上避免模擬觸發系統所存在的信號損傷。為了評估觸發點,數字觸發器將采用精確的 DSP 算法來檢測有效的觸發器事件,并準確地測量時間戳。執行實時信號處理所面臨的挑戰在于需要無縫監視測量信號。比如,R&S?RTO 系列示波器中的數字觸發器采用了 8 位 ADC 以 10GS/s 的速率進行采樣,并以 80 Gb/s 的速率來處理數據。

評論